用户层的I/O软件
小部分I/O系统软件放在了用户应用层上。
库函数(与应用程序链接)
假脱机技术(虚拟设备)
1)系统调用与库函数
不允许运行在用户态的应用进程,去直接调用运行在核心态(系统态)的OS过程。
应用进程在运行时,又必须取得OS所提供的服务。
于是:
OS在用户层中引入了系统调用,应用程序可以通过它,间接调用OS中的I/O过程,对I/O设备进行操作。
待第9章讨论
2)设备分配中的虚拟技术 —— SPOOLing技术
虚拟性是OS的四大特征之一。
多道程序技术将一台物理CPU虚拟为多台逻辑CPU,实现多个用户共享一台主机;
如何将一台物理I/O设备虚拟为多台逻辑I/O设备,允许多个用户共享“同时使用” /p>
假脱机技术
多道程序技术,专门利用程序模拟脱机I/O的外围机,完成设备I/O操作。
称这种联机情况下实现的同时外围操作为SPOOLing 技术(Simultaneaus Periphernal Operating On—Line,或称为假脱机操作)
一般进程对独占设备的需求被假脱机模拟到磁盘上。所以实现设备虚拟,多道是前提,还需高速、大容量、可随机存取的外存支持。
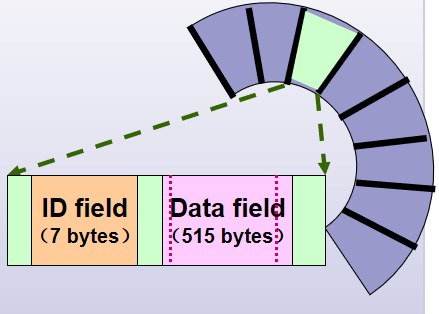
SPOOLing系统的组成
主要有三大部分(如下页图)
输入井和输出井:磁盘上开辟两大存储空间。输入井模拟脱机输入的磁盘设备,输出井模拟脱机输出时的磁盘。
输入缓冲区和输出缓冲区:为缓解速度矛盾,内存中开辟两大缓冲空间,输入缓冲区暂存输入设备送来的数据,再送给输入井;输出缓冲区暂存输出井送来的数据,再送输出设备。
输入进程和输出进程。
用一进程模拟脱机输入时外围设备控制器的功能,把低速输入设备上的数据传送到高速磁盘上;
用另一进程模拟脱机输出时外围设备控制器的功能,把数据从磁盘上传送到低速输出设备上。

缓冲管理
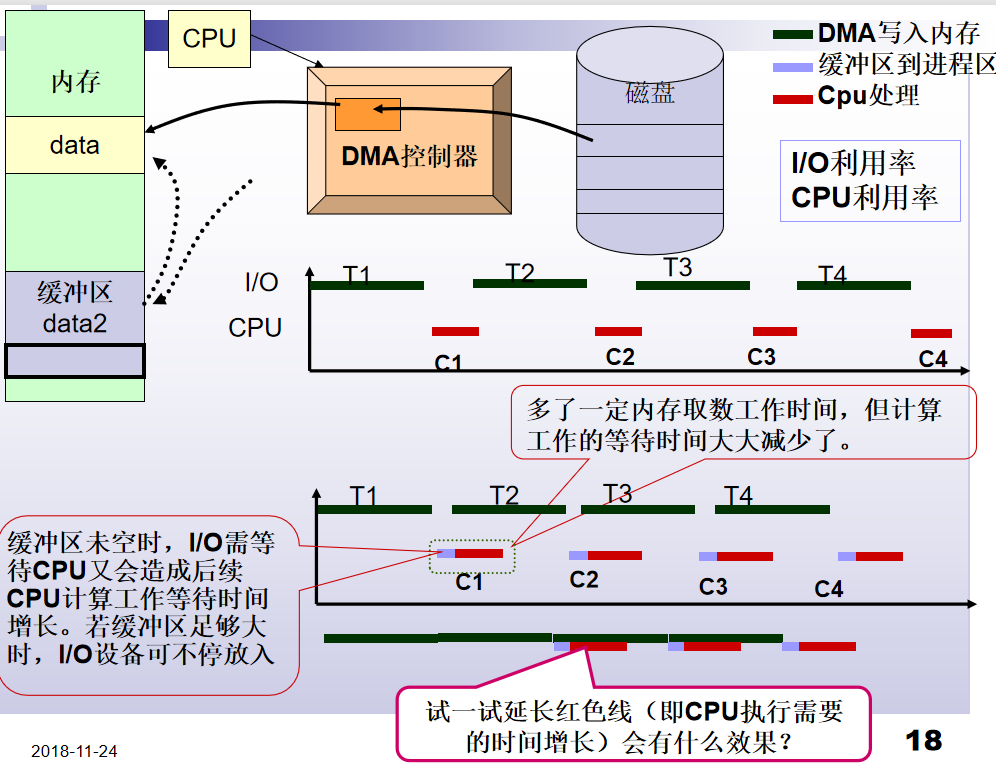
I/O控制方式减少CPU对I/O的干预提高利用率;
缓冲则通过缓和CPU和I/O设备速度不匹配矛盾,增加CPU和I/O设备的并行性,提高利用率。
现代OS中,几乎所有的I/O设备与处理机交换数据时,都用了缓冲区。
引入缓冲区的主要原因:
缓和CPU与I/O设备间速度不匹配的矛盾。
缓冲区数据成批传入内存,也可进一步减少对CPU的中断频率
最终目的:提高CPU和I/O设备的并行性。
使用缓冲区的方式:
1)单缓冲、多缓冲
2)循环缓冲
3)缓冲池(Buffer Pool)
1)单缓冲与多缓冲
单缓冲(Single Buffer)
每当用户进程发出一I/O请求时,
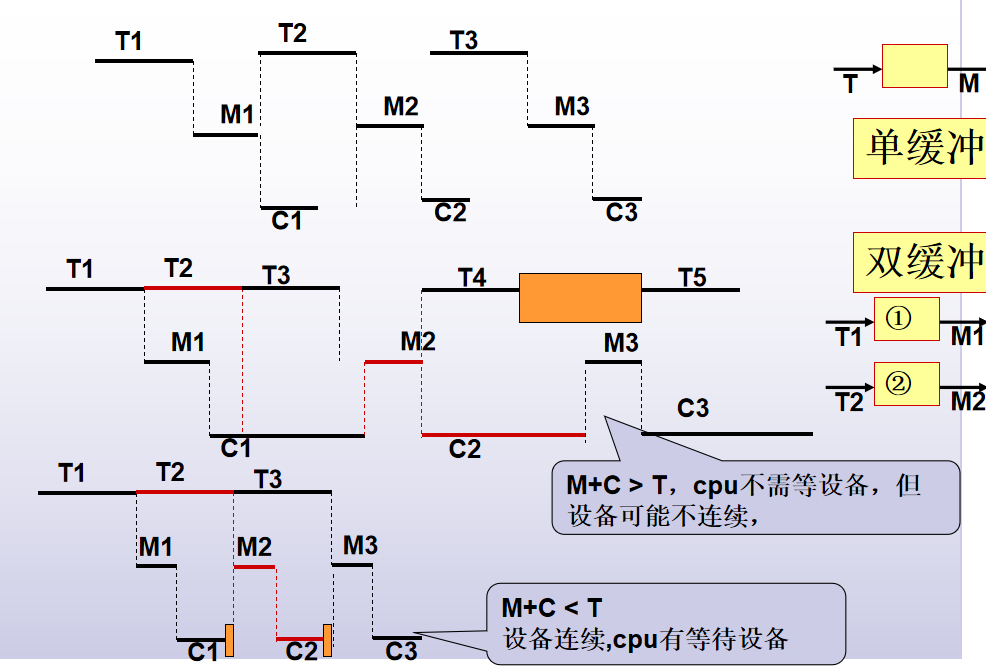
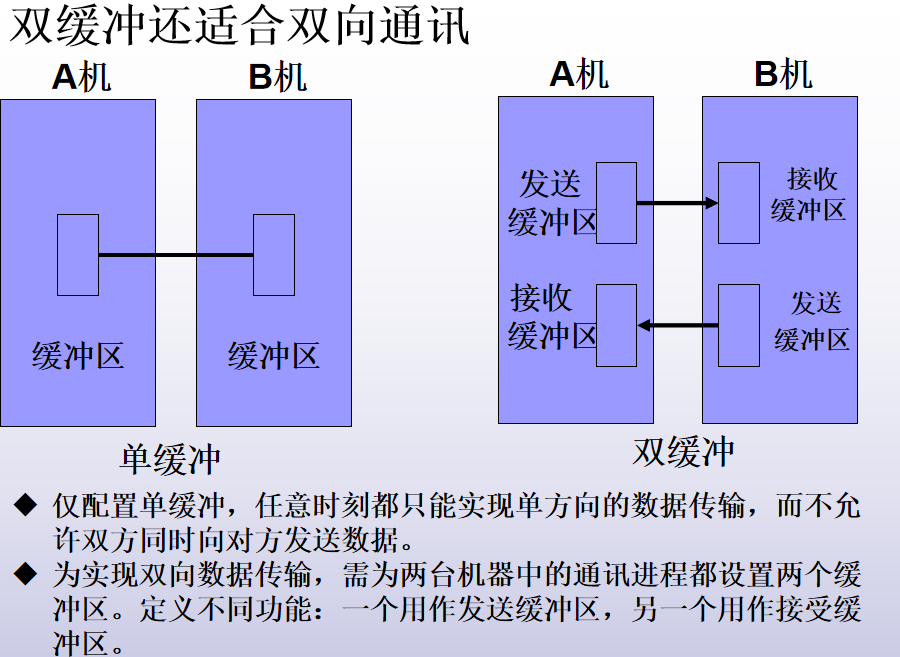
双缓冲(Double Buffer)
进一步加快输入和输出速度,提高设备利用率制,也称缓冲对换(Buffer Swapping)
输入:数据送入第一缓冲区,装满后转向第二缓冲区。
读出:OS从第一缓冲区中移出数据,送入用户进程,再由CPU对数据进行计算。
两个缓冲区,CPU和外设不再针对一块交替
可能实现连续处理无需等待对方。前提是CPU和外设对一块数据的处理速度相近。而如下图情况CPU仍需等待慢速设备。
多缓冲引入
I/O与CPU速度基本相匹配,采用双缓冲能获得较好的效果,基本上能并行操作。
但,若两者的速度相差甚远,双缓冲的效果仍不够理想;
为进一步协调速度差,可增加缓冲区数量,同时进行一定的多缓冲管理入和出的同步。
引入多缓冲机制。组织形式:循环缓冲、缓冲池。
2)循环缓冲(circular buffer)
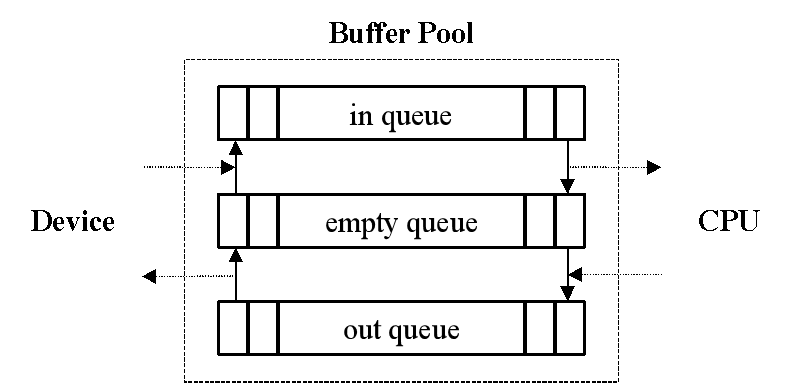
①缓冲池的组成
对于既可输入又可输出的公用缓冲池,至少应含有下列三种类型的缓冲区:
空缓冲区;
装满输入数据的缓冲区;
装满输出数据的缓冲区;
为方便管理,将上述类型相同的缓冲区连成队列
空缓冲区队列(所有进程都可用)
输入队列(n个进程有各自的队列)
输出队列(n个进程有各自的队列)
*(队列长度不固定,根据进程实际情况灵活变动,需要多少用多少)
工作状态决定了current有四种工作缓冲区:
状态 操作者
收容输入数据的工作缓冲区;hin
提取输入数据的工作缓冲区;sin
收容输出数据的工作缓冲区;hout
提取输出数据的工作缓冲区;sout
②缓冲区的工作方式
四种工作方式:
收容输入:Getbuf(emq),hin;输入数据填入一空缓冲区;Putbuf(inq,hin)
提取输入: Getbuf(inq),sin;从输入缓冲队列中取出一数据区的内容;Putbuf(emq,sin)
收容输出: Getbuf(emq),hout;输出数据填入一空缓冲区;Putbuf(outq,hout)
提取输出: Getbuf(outq),sout;从输出缓冲队列中取一数据区的内容;Putbuf(emq,sout)
与速度有关
磁盘类型
固定磁头(每道一磁头)
移动磁头(每盘一磁头)
访问时间的计算
寻道时间(到磁道)
旋转延迟(到扇区)
传输时间
传输时间占总时间的比例最小,磁盘读写速度的提高要选择合适的调度算法,减少前两项用时,使所有作业的磁盘处理时间均衡。
2)磁盘调度方法
对所有请求访问磁盘的进程进行合理调度,使对磁盘的平均访问时间最小。
目标:使平均寻道时间最少。
算法:
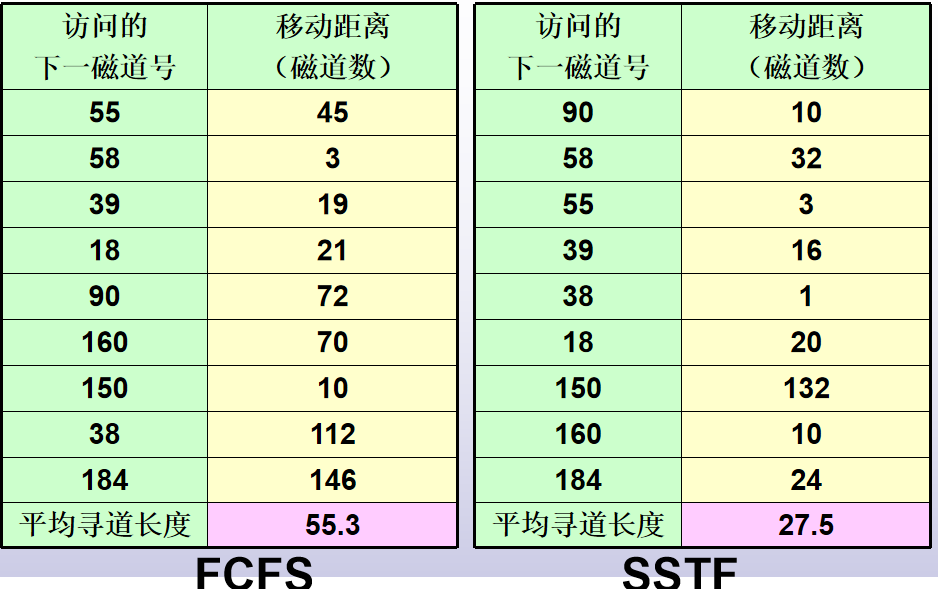
FCFS
最短寻道时间优先SSTF
扫描算法SCAN(磁盘电梯调度算法)
循环扫描算法CSCAN
N-Step-SCAN算法
FSCAN算法
①FCFS
多个进程的磁盘I/O请求构成一个随机分布的请求队列。
磁盘I/O执行顺序按磁盘请求的先后顺序。
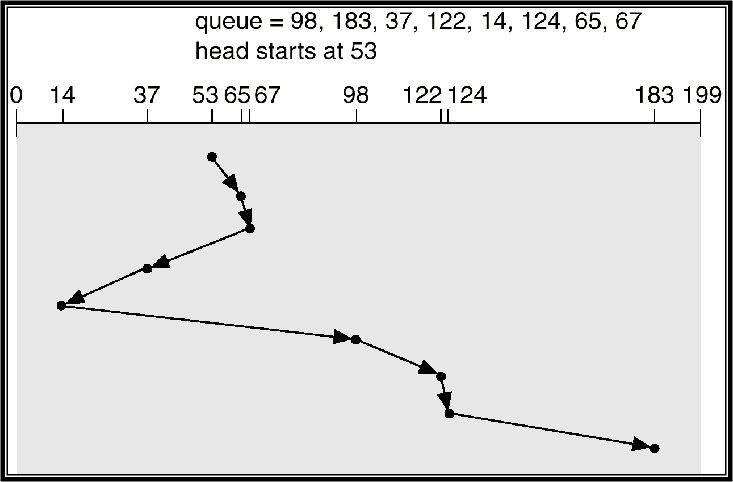
设当前在100磁道上;
进程要求的访问顺序:55,58,39,18,90,160,150,38,18
③扫描算法SCAN(磁盘电梯调度算法)
SSTF会导致“饥饿”现象
总选择最近的磁道访问,远磁道请求的进程会长时间得不到执行。
改进:
考虑距离的同时,更优先考虑方向
SCAN算法
规定磁头移动方向:自里向外,再自外向里移动。
后续的I/O磁道请求,哪个在规定方向上距离最近,就先执行哪个。
如当前为100,后续要求55,86,95,180,165,105
先由内向外:选最近的105执行,再判断剩余的,选165,180。
再由外向内:95,86,55
反方向较近的55号磁道请求的进程相对“饥饿”很久
循环扫描CSCAN
SCAN的错过问题:
容易错过与当前磁道距离近,但方向不一致的磁道。
修改:将SCAN规定的移动方向改为“单向移动”
由里向外后,再由里向外。
N-Step-SCAN
前述最近寻道算法共同问题:
“磁臂粘着”——磁头静止在一个磁道上,导致其它进程无法及时进行磁盘I/O。(因:高密度盘,进程的读写可能集中在某一磁道)
如现有一系列请求:
3 3 5 2 3 3 3 2 3 3 2 3 3 4 4 5 2 3 3 3 4 4 2 3 3 3 2 2 2 3
不管哪种算法,从3开始向下执行会是
3 3 3 3 3 3 3 3 3 3….2 2 2 2 2 2 … 4 4 ….
改进:
将磁盘请求队列分成长为N 的子队列
按FCFS选择子队列。队列内又按SCAN算法。
3 3 5 2 |3 3 3 2| 3 3 2 3| 3 4 4 5| 2 3 ….2 3
处理子队列过程中产生的新I/O再依次排队列。
N=1时,就是FCFS,N很大时就是SCAN。
F-SCAN
N-Step-SCAN的简化:
请求队列只分为两个子队列
当前一个队列,按SCAN算法执行;
扫描期间新生成的组成一个队列,等待被扫描。
假设一个活动头磁盘有200道,编号从0-199。当前磁头正在155道上服务,并且在此之前完成的是173道的访盘请求。
现有如下访盘请求序列(磁盘号):75,168,81,138,87,143,187,129,198,44。试给出采用下列算法后磁头移动的顺序和移动总量(总磁道数)。
1.最短寻道时间优先(SSTF)磁盘调度算法。
2.扫描法(SCAN)磁盘调度算法(假设沿磁头移动方向不再有访问请求时, 磁头就沿相反方向移动。 44到0磁道的移动忽略不计)
答:1.SSTF磁头移动顺序:
155,143,138,129,168,187,198,87,81,75,44
三段(155~129,129~198,198~44)
移动总量=155-129+198-129+198-44=249
2.SCAN:
155,143,138,129,87,81,75,44,168,187,198
两段(155~44,44~198)
移动总量=155-44+198-44=265
来源:吃饭睡觉打code
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!