ROS导航功能包示例husky amcl gmapping slam exploration

结构如下:
按官网介绍,安装并配置后,启动示例如下:

启动一个仿真环境,激光和深度传感器有效。
启动rviz。
exploration自主地图探索包含三个功能gmapping,move_base,exploration。
其中exploration.launch使用frontier_exploration进行地图探索:
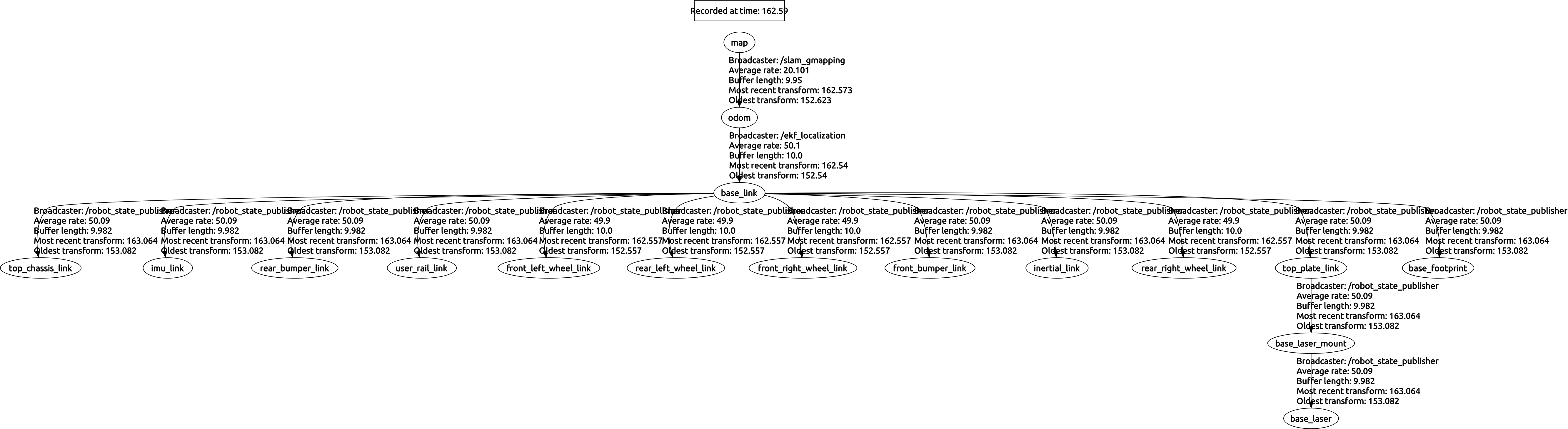
graph:
–附录–来源官网
Husky
ROS软件维护者:Clearpath机器人
目录
1. Husky
1. 安装
2. 用法
3. 演示应用程序
1. 导航
2. 操纵
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!