前言
本博客着重讲述如何进行对ardupilot软件仿真和调试,搭建编译环境和vscode的使用教程不再本文的讲述范围。
一、安装vscode
下载地址:Visual Studio Code – Code Editing. Redefined
在安装包所在文件夹中打开终端,输入以下命令,安装vscode
二、软件仿真
1.将下面一句根据你的情况修改后添加到~/.profile中,这个路径是ardupilot工程在你电脑中的位置
2.在ardupilot/ArduCopter文件夹下打开终端,并输入
提示:增加UDP输出
sim_vehicle.py -v ArduCopter -f quad –console -D –out 192.168.10.182:14555查看插入电脑的USB转串口设备:ls -l /dev/serial/by-id/或dmesg | grep ttyUSB*
使用USB转串口设备:sim_vehicle.py -v ArduCopter -A “–uartE=uart:/dev/ttyUSB0” -D
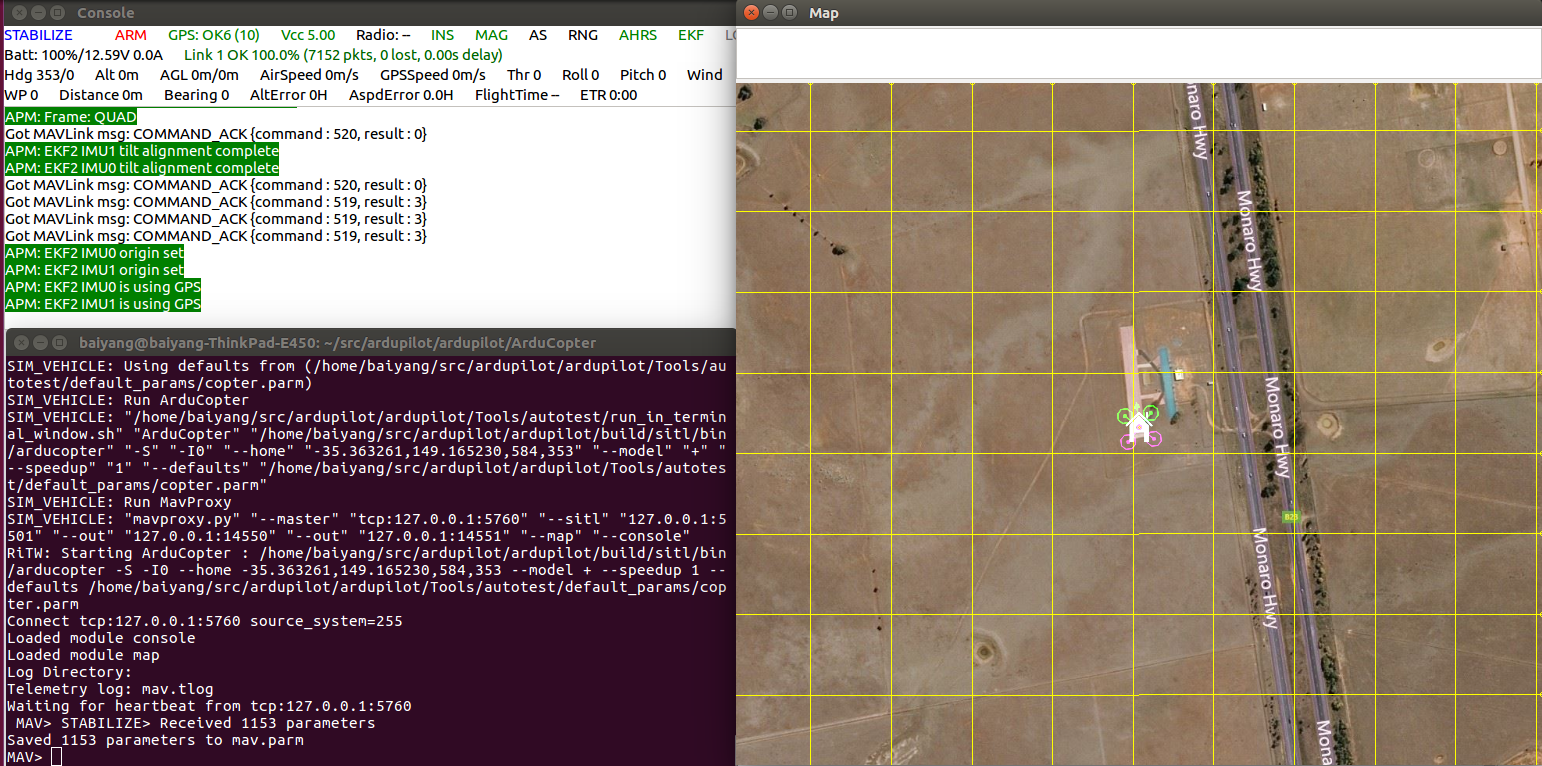
几分钟后,软件仿真就启动了。

三、调试
提示:
对于Ubuntu用户,默认保护将阻止您从IDE将gdb附加到SITL:请参阅此处。这将导致您第一次尝试附加到本地进程时出现错误消息。
在这种情况下,请执行以下操作之一:
- 要临时禁用此限制,请打开终端输入命令:
- 要永久禁用此限制,请打开文件进行编辑,并将内核kernel.yama.ptrace_scope = 1更改为kernel.yama.ptrace_scope = 0.要立即应用更改,请输入上述命令。或者,运行或只是重新启动系统。
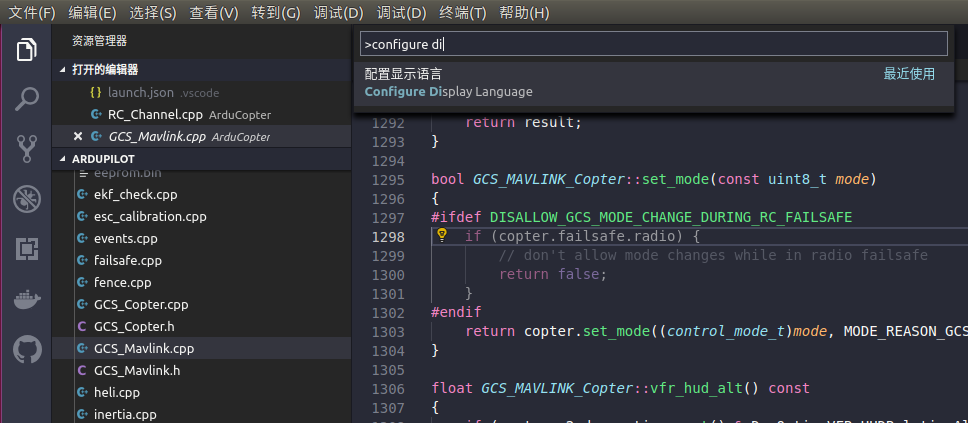
1.汉化vscode
打开vscode后,使用快捷键【Ctrl+Shift+P】,然后选择配置显示语言
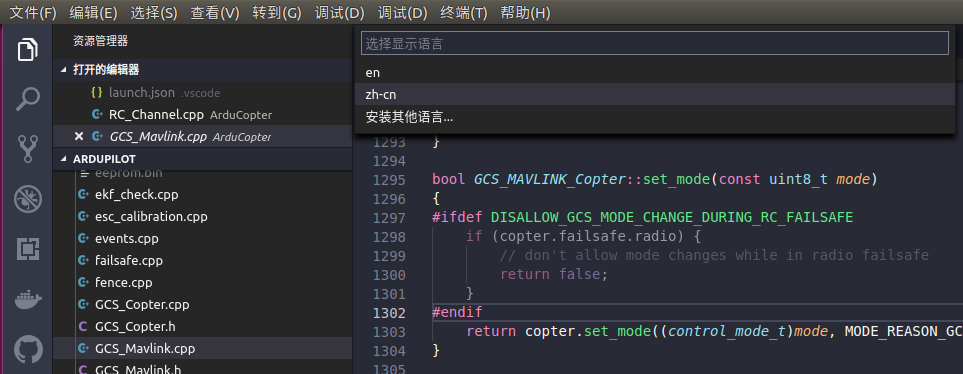
选择zh-cn,然后重启。
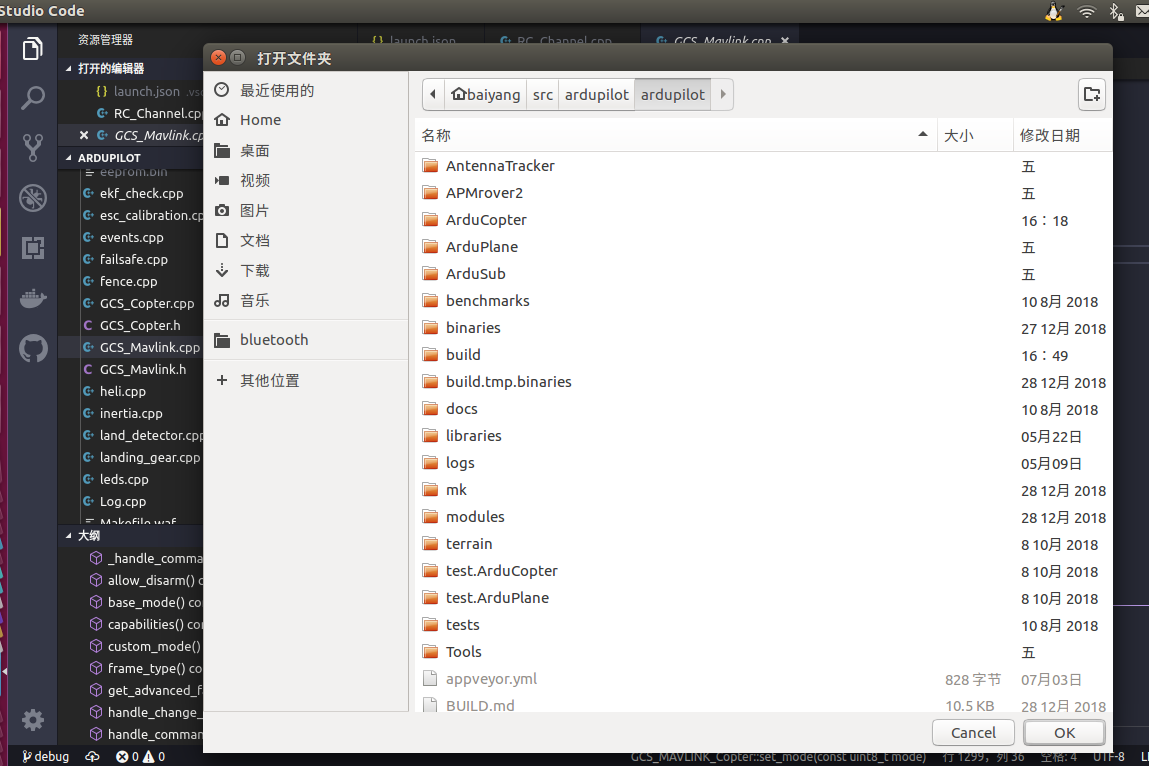
2.点击文件->打开文件夹,选择到ardupilot在你电脑中的位置,然后点击ok
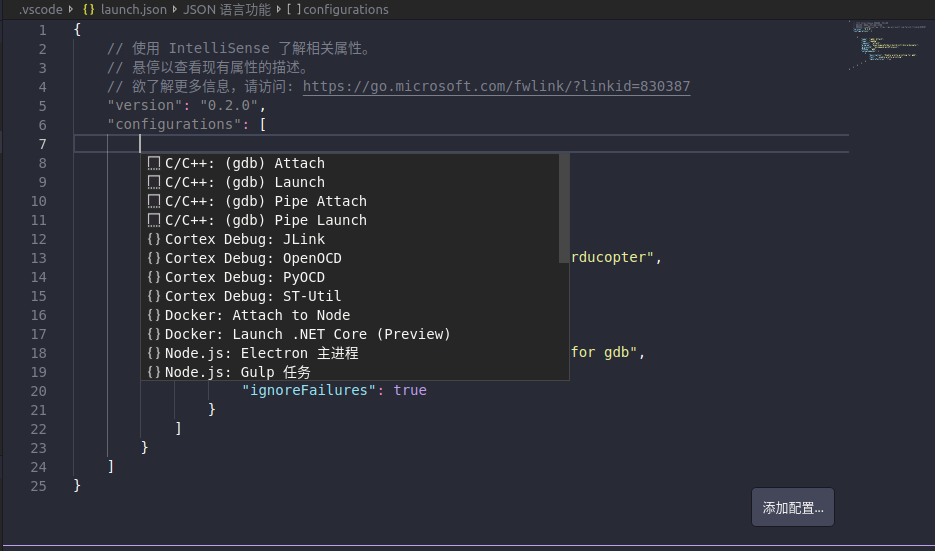
3.点击调试->添加配置,选择”(gdb) Attach”或”(gdb) 附加”,
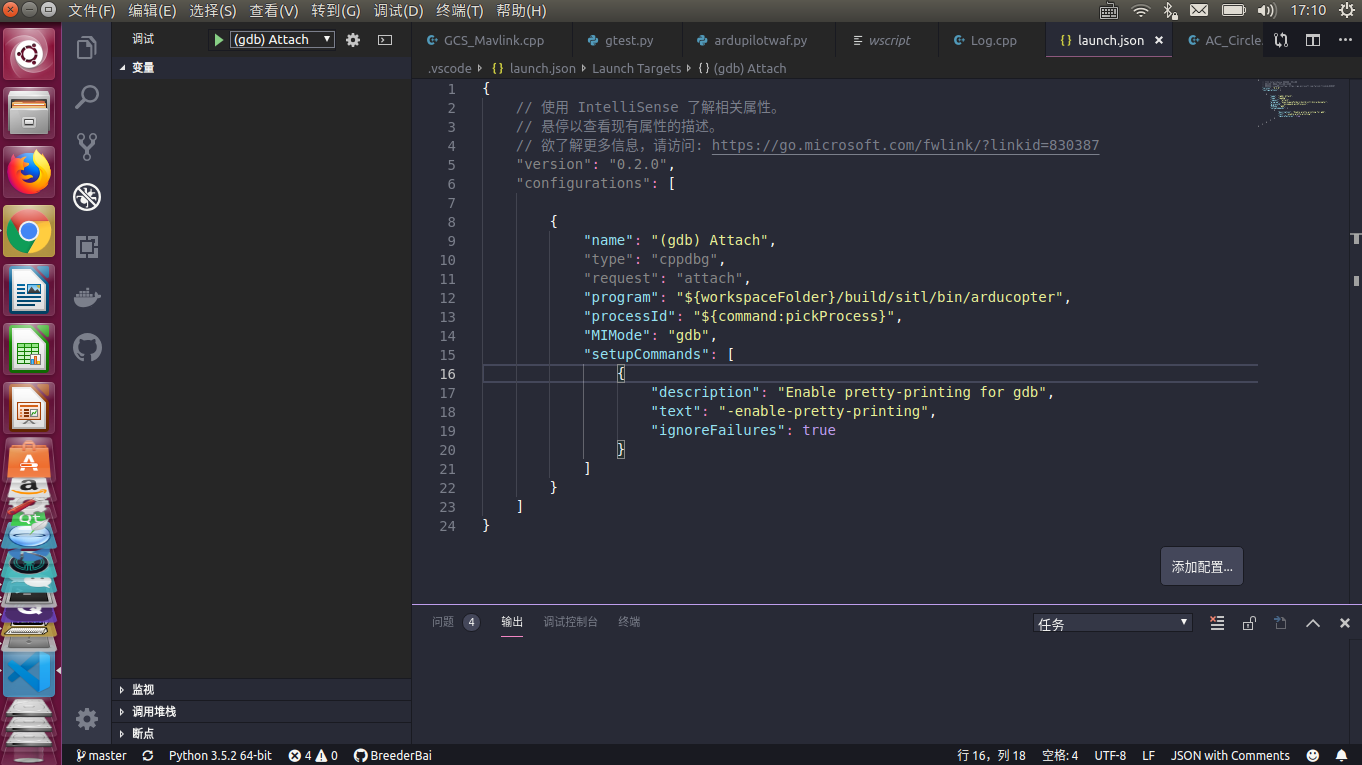
将
改为
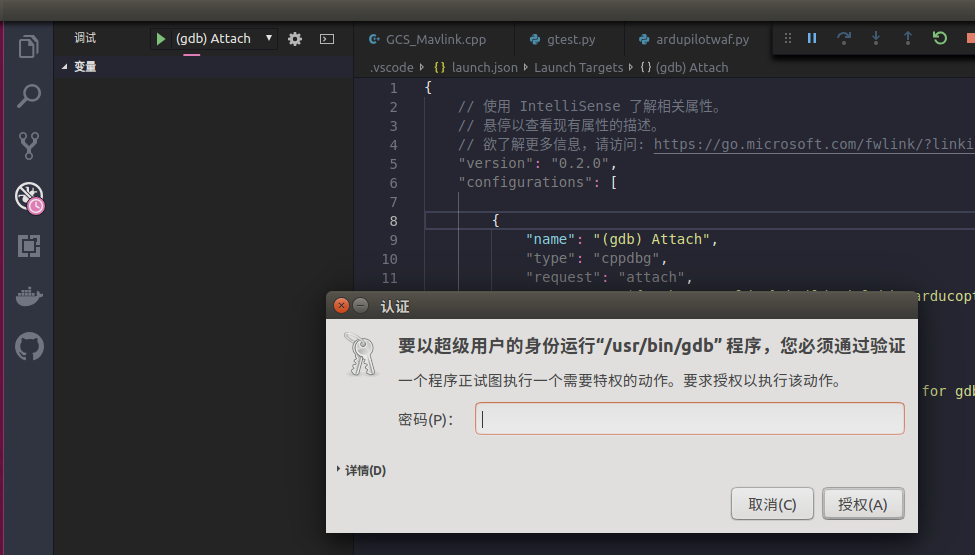
4. 选择调试菜单栏,点击左上角的开始按钮(绿色三角)
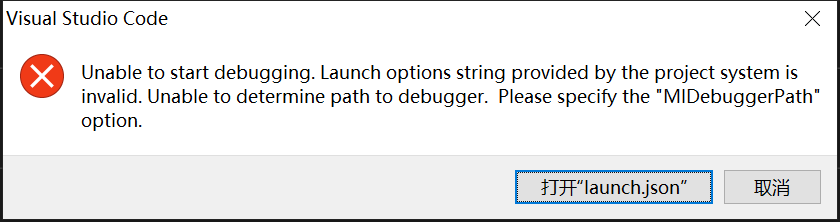
在弹出的命令行中选择ArduCopter,然后进行超级用户的认证。如果选中后,有英文提示的错误,大约意思是需要换”MIMode”: “gdb”这个内容,有可能是没有装gdb,执行sudo apt-get install gdb,然后再试下。
提示:在windows使用vscode远程打开wsl中的ardupilot工程,执行调试,点击三角后,有可能出现如下报错。这个是因为没有安装gdb。
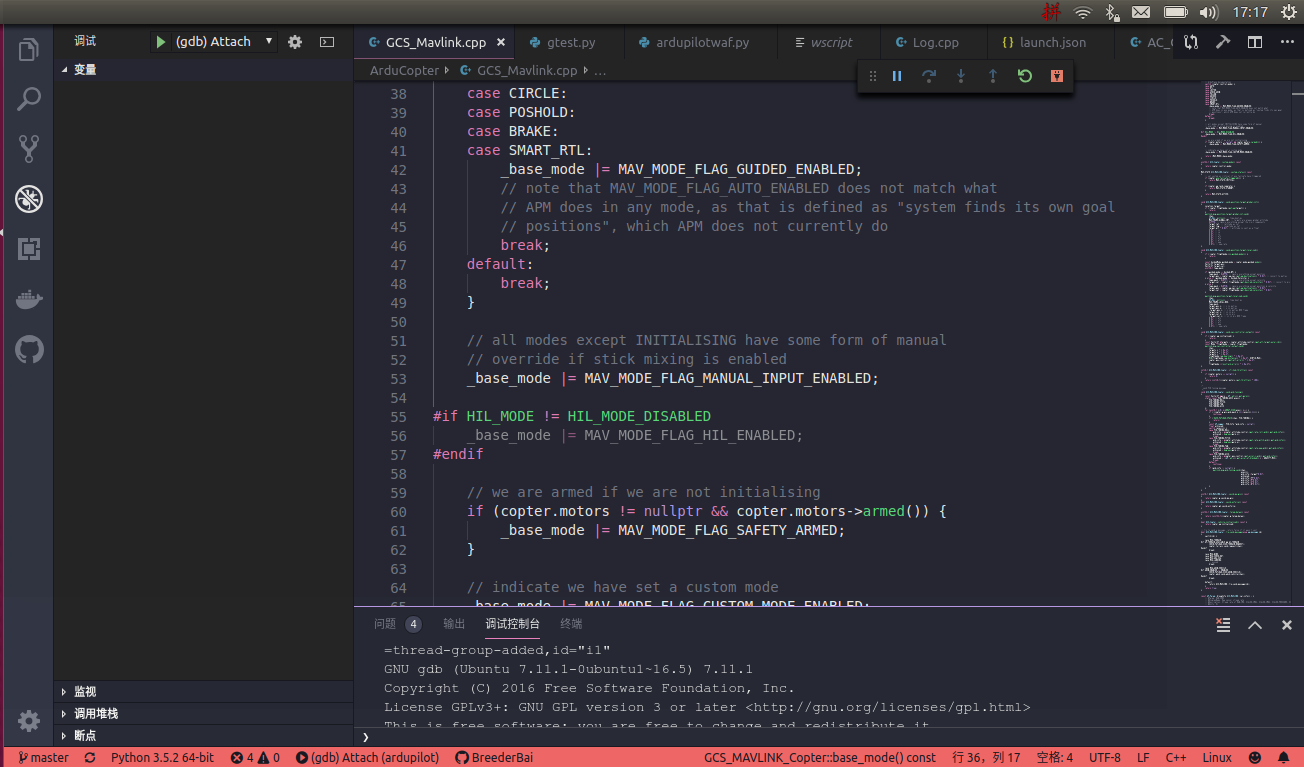
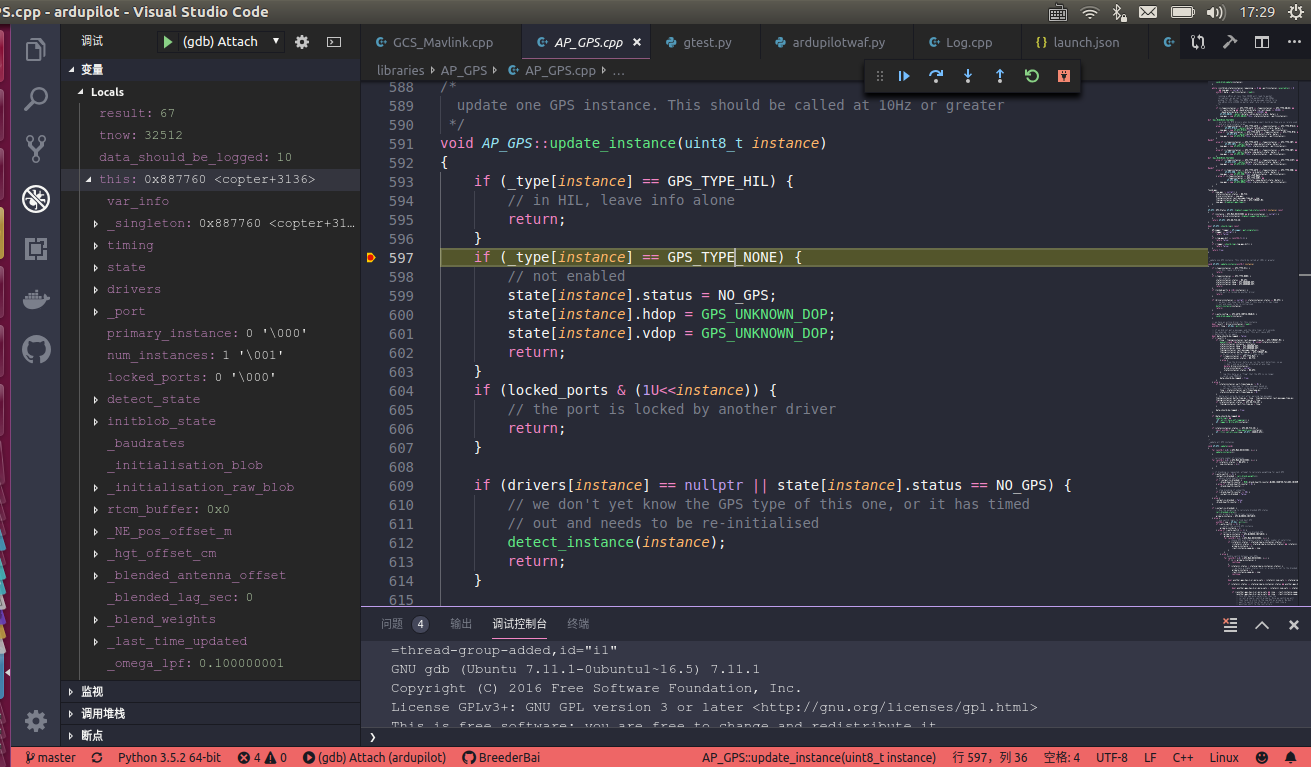
现在调试的配置就完成。 到这一步,就可以放置断点进行调试了
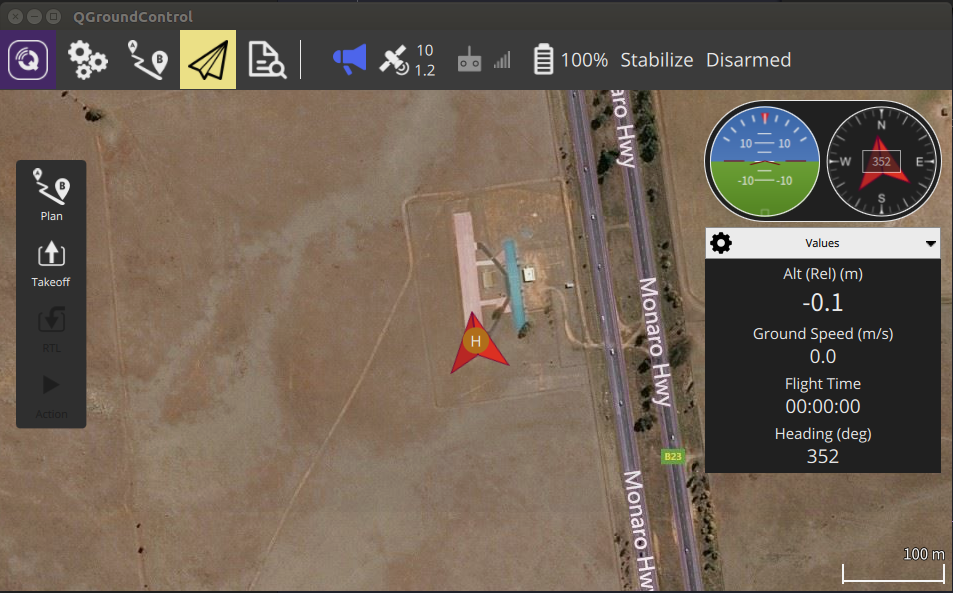
打开QGC后,QGC会自动链接到ardupilot的仿真模型。
5.为了更加愉快的调试,可以通过遥控器USB加密狗将fubata遥控器链接到电脑,通过QGC校准后,操作仿真模型


注意:点击start后,一定要油门杆拉到最低,不要像校准界面图这样,要不油门会只有一半起作用。
来源:BreederBai
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!