

创客基地QQ群:489095605 232237692
邮箱:Huangkaida@makerbase.com.cn
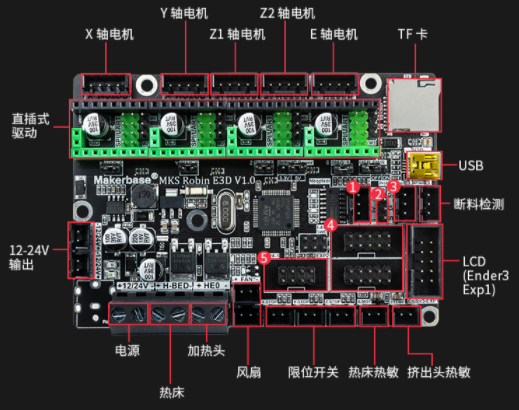
一、产品简述
MKS E3主板是创客基地推出的32位3D打印主控板,该主板CPU采用STM32F103RCT6,主频最高72MHZ,支持TMC驱动 UART模式、无限位回零,主板预留Bltouch接口,可搭配3Dtouch、BLtouch实现自动调平,主板可直接安装到Ender_3S、CR_10机器上,对机器进行升级,。
1.1 特点优势
1、 采用ARM 32-bit CortexM4 CPU STM32F103RCT6 主频最高72MHZ;
2、支持DC12-24V输入,端子为KF635 30A/300V;
3、热床支持20A以内电流,端子为KF635 20A/300V,TB是热床测温(NTC100K);
4、 1路喷头支持10A以内电流,ETEMP是1路喷头测温(NTC100K)
5、1路独立可控风扇支持1A以内;
6、 灵活的电机驱动座方式,可支持TMC2209、2208、2225、2226,4988,8825,2100,及各种直插式驱动,支持TMC驱动UART模式;
7、 支持断电检测,断料检测,BLTOUCH
8、 引出AUX-1接口,支持MKS TFT系列触屏,支持LCD屏
9、板载SDIO接口TF卡座
10、支持 USB联机打印
1.2 主板参数
1.4尺寸图
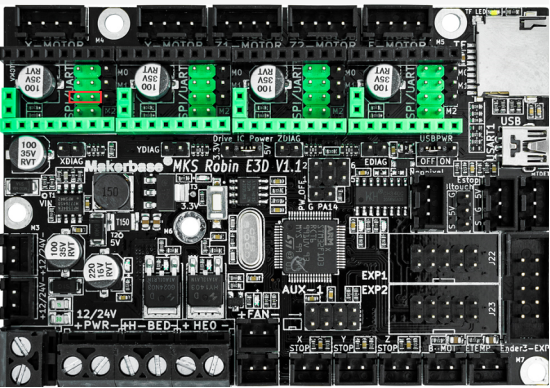
3.1 A4988驱动跳线设置
A4988驱动细分跳线方式,驱动下方右边的3个跳线帽都插上是16细分,如下图(X轴为例):
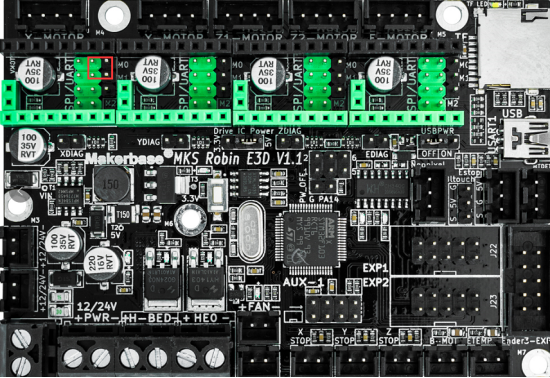
3.3TMC2225普通模式跳线设置
TMC2225驱动细分跳线方式,驱动下方右边的第2个跳线帽(M1)插上是16细分,如下图(X轴为例):
注:UART 模式可以在屏上设置驱动的电流、工作模式,要实现UART 模式,还需要固件的支持,固件的配置方式详情见4.3.7
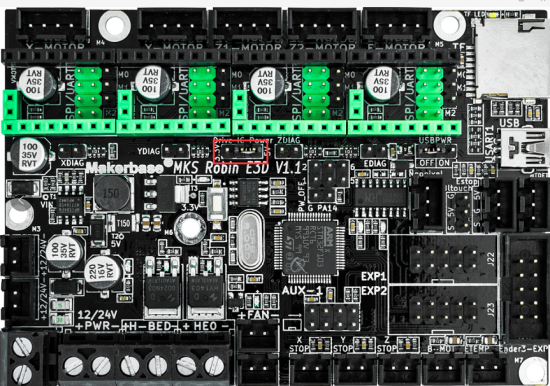
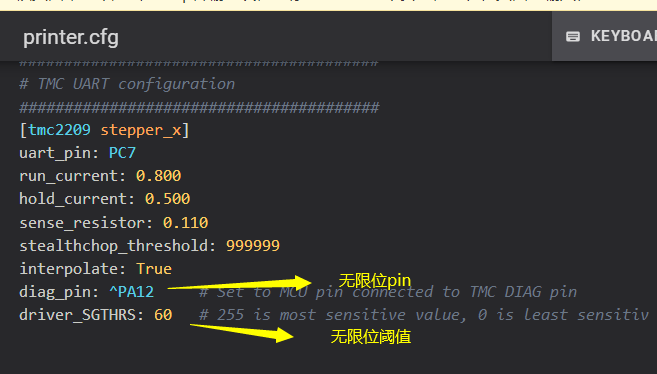
3.5 TMC2209、TMC2226 Sensorless(无限位)跳线设置
TMC2209、TMC2226 要实现sensorless功能,需要首先将驱动设置为UART 模式,限位接口不能接限位,然后需要在主板上的DIGA 排针处对应插上跳线帽,如下图(以X、Y轴为例):

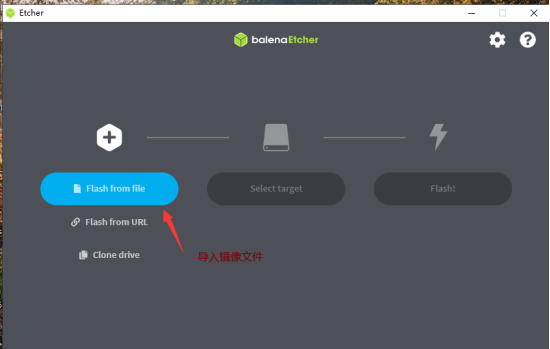
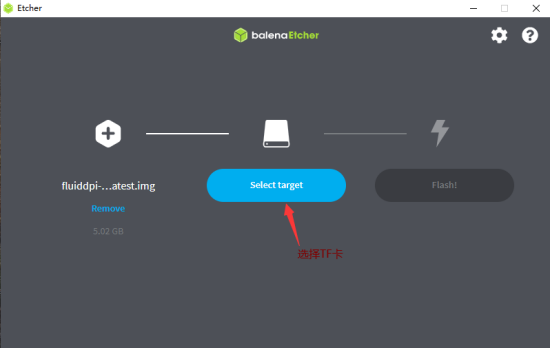
4)运行balenaEtcher

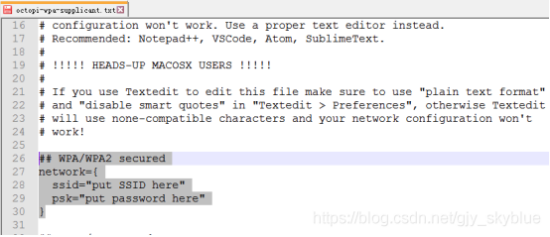
4.4 树莓派网络连接
1)、安全弹出TF卡,并重新插入读卡器,系统将识别到一个256M大小的分区,打开该分区找到 “fluiddpi-wpa-supplicant.txt“文件。
3)在路由器管理界面查看新设备的iP,并记录
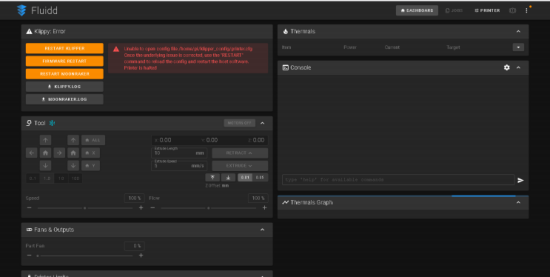
注意:第一次登录后,在没有完全配置正确的配置文件时会出现报错,可以不用处理,后面配置正确的配置文件后报错不会出现。
五、SSH连接
SSH的作用是发送指令操作树莓派,进行固件的编译、系统的升级等。
1)下载安装Xshell软件,Xshell6Portable 下载地址:https://www.netsarang.com/zh/free-for-home-school/
2)打开Xshell软件,建立新的会话
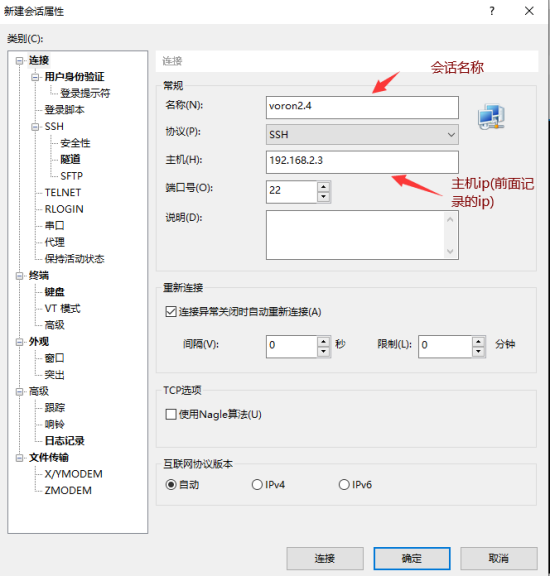
3)然后点击连接

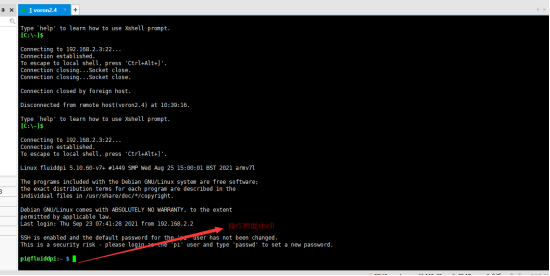
5)双击新建的会话连接,弹出密码输入界面,密码:raspberry,输入密码后进入linux操作系统的用户界面shell。
六、主板与树莓派连接
用USB 线连接树莓派与主板,树莓派需要单独的5V/1A电源供电。
七、printer.cfg配置文件修改
MKS Robin E3D的配置文件下载链接:
https://github.com/makerbase-mks/Klipper-for-MKS-Boards/tree/main/MKS%20Robin%20E3-E3D
7.1在fluidd上创建新文件
在“配置”选项卡里找到“+”,点击添加文件,文件名为:printer.cfg
7.2 编辑printer.cfg文件
1)单击新添加的文件“printer.cfg”,选择“编辑”
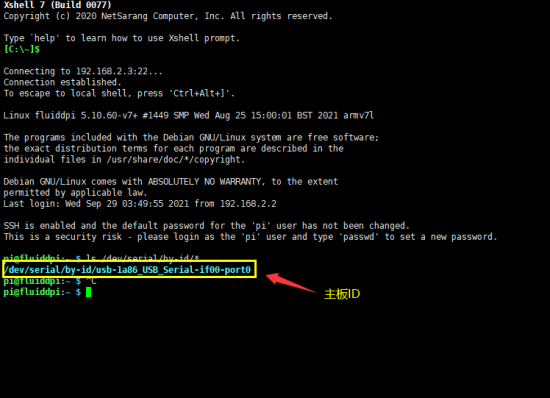
2)复制主板ID到printer.cfg中
八、基本参数检查和修改
8.1限位开关pin配置
X轴的限位为PA12,Y轴的限位为PA11,Z轴的PC6限位为。
8.2 X Y Z轴限位开关电平检查
确保X、Y和Z轴的限位开关都没有被触发,然后通过控制台发送命令:
QUERY_ENDSTOPS
2)在配置文件中将限位pin改为(X轴为例):
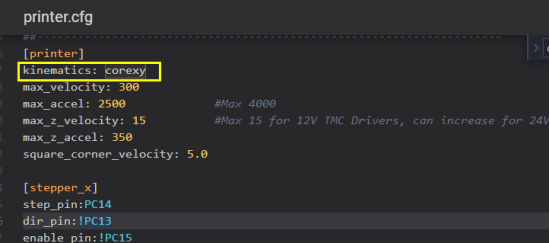
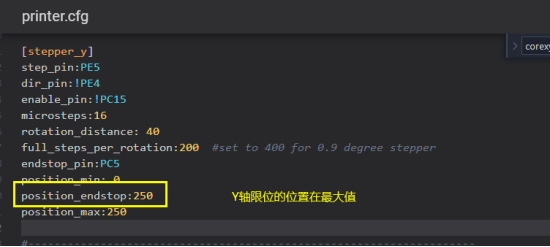
8.7 归零方向设置
归零方向配置,配置限位的位置即可,往最小方向归零,则配置限位的位置为最小的位置,往最大方向归零,则配置限位的位置为最大的位置 (下图为X和Y轴都往最大限位归零)。
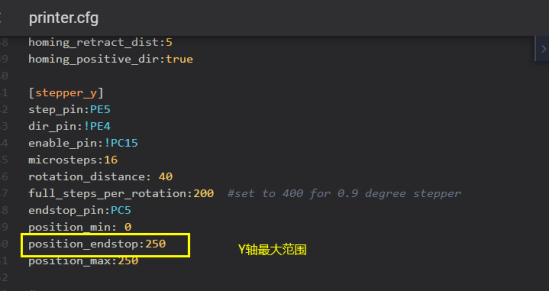
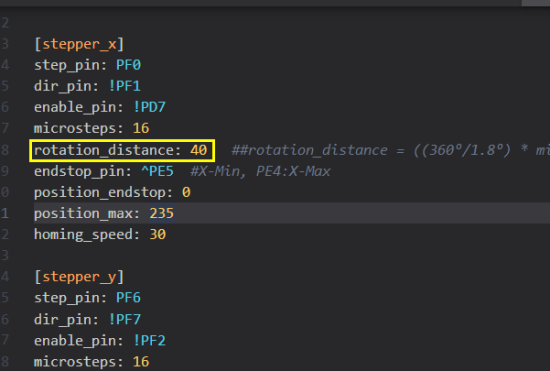
8.8打印平台范围设置
打印平台的范围需要根据自己的机器的尺寸进行设置
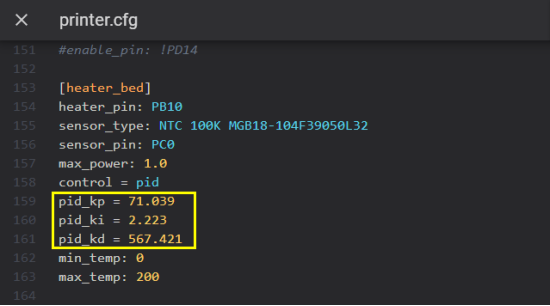
8.10热床PID校正
G28归零后,将喷嘴移至热床中心,高出床面约5-10mm,然后发送命令
它将执行一个PID校准程序,将持续约10分钟,完成后控制台将会返回PID数值,将其复制到热床的PID设置即可。
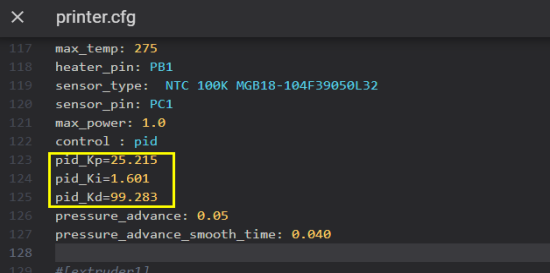
8.11挤出头PID校正
先将模型冷却风扇设置为25%的转速( M106 S64 ),然后发送命令
它将执行一个PID校准程序,将持续约5分钟,完成后控制台将返回PID数值,将其复制到配置文件即可。
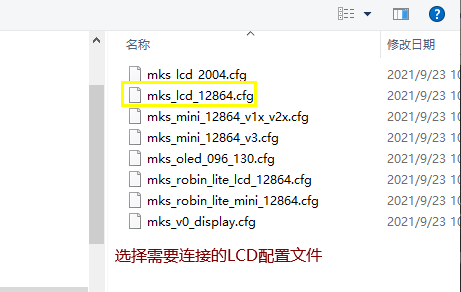
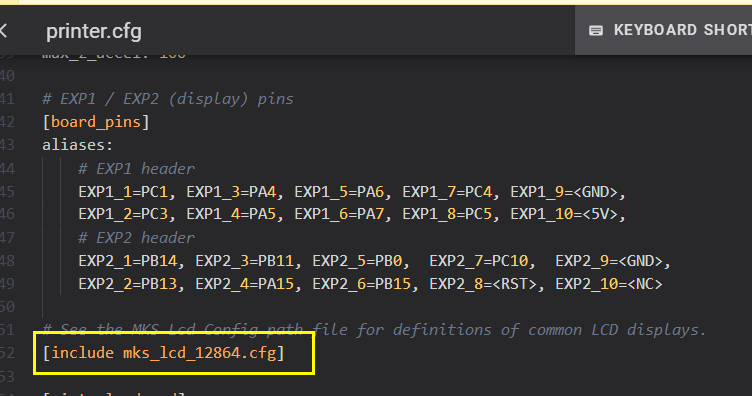
九、LCD屏幕配置
1)下载LCD配置文件,文件下载链接:
https://github.com/makerbase-mks/Klipper-for-MKS-Boards
2)将文件解压,然后在fluidd配置文件界面导入需要连接的LCD的配置文件(以LCD12864为例)。
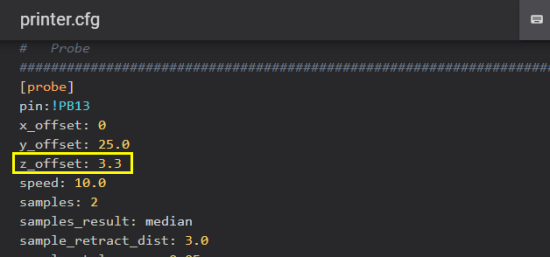
十、3dtouch自动调平
10.1设置传感器信号pin
传感器信号pin需要根据主板的接线进行设置,(白线是3dtouch的信号线,黄线是3dtouch的舵机控制线),舵机控制线接到主板上的PA3接口,信号线接到主板的PB1。

10.3 设置探测位置
探测位置的设置需要根据机器的尺寸、挤出头与探针之间的偏移,两者计算得出探测的最小位置和最大位置,探针和挤出头的位置均不能超出平台范围。
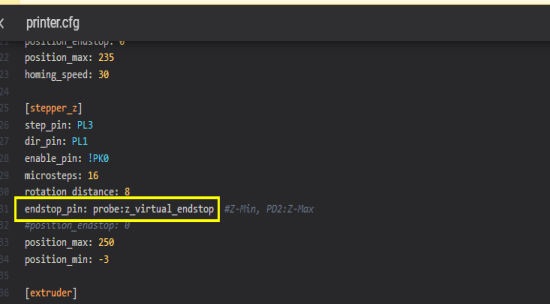
3)在配置文件屏蔽 position_enstop:0
十三、技术支持及保证
货前会做通电测试,保证可以正式使用才发货。
迎各位朋友加入讨论群:232237692
迎光临博客交流: https://blog.csdn.net/gjy_skyblue
D打印机主板定制,联系黄生:13148932315 谭生:15521395023 彭生:13427595835
问题可联系我们客服或者在群里找技术支持人员,我们将竭诚为您服务
十四、FAQ
更多关于Klipper固件的配置,可以登录Klipper固件官方github
Klipper网址链接:https://github.com/Klipper3d/klipper
问题1:**Octoprint终端发送FIRMWARE_RESTART无法返回温度,如何处理br> 答: 对主板手动复位,重新发送“FIRMWARE_RESTART”指令
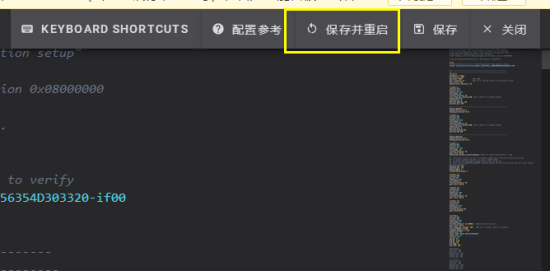
问题2:复制配置文件到printer.cfg后,fluidd上还是显示报错如何处理br> 答:检查配置中的主板id是否正确,详见6.3,复制id到配置后需要保存和重启
问题3:**常见报错如何处理br> 报错1:TMC UART Error
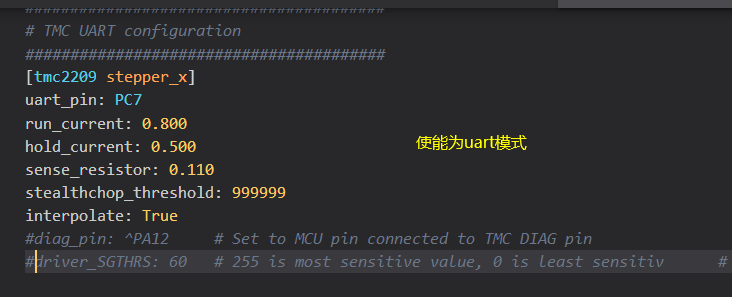
答:TMC驱动报错是因为主板固件使能了TMC 驱动uart模式,而主板与驱动之间通讯失败。
1)、确认主板是否用了TMC驱动(TMC2208、2209、2225、2226),如果没有使用,则需要在配置文件屏蔽TMC驱动详见7.3
2)、使用了TMC驱动,固件配置又是正确的,需要确认硬件是否已设置为uart 模式,就是驱动下方的跳线是否正确,详见2.4
报错2:Currently Throttled
答:树莓派供电不足或电压不稳时,将会有Currently Throttled报错,需要确保电源供电稳定(单独5V开关电源供电),确保电源线接线良好。
报错3:无限位归零后出现Endstop x still triggered after retract报错,如何处理/p>
答:调小无限位归零阈值。
文章知识点与官方知识档案匹配,可进一步学习相关知识网络技能树首页来源:Makerbase_mks
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!