前言
利用视觉进行测距,大家都知道哪些方案呢了常见的传统的双目立体视觉(可以参见《立体视觉动态测量技术》)、TOF技术、面结构光技术(可以参见《3D Scanner相机》),当然还有很多种方案,此处我们介绍线结构扫描技术,本文也经师兄授权转载自公众号——机器视觉检测与自动化。
值得一提的是,该工作主要由我们老师及我的同门与师兄师弟共同完成。好了,废话就说到这里啦,开始步入正题。
系统简介
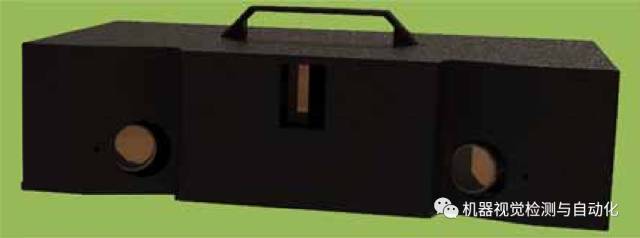
针对车间现场对零部件高精度三维测量的需求,本产品通过高品质的立体相机 成像系统和激光扫描头的组合,构成了三维激光扫描测量解决方案。
静态场景测量
激光扫描系统能够精确测量静态场景,提供场景三维数据给机器人使其能够在抓取工件之前定位工件,并且计算出最佳的抓取位姿。激光扫描系统使用先进的技术,是目前在恶劣的工业环境中提高工件测量效率的理想选择。


卓越性能
-
使用对象广,无论反光金属件、黑色铸造件,还是高温锻造件
-
易学易用,便携式现场快捷测量
-
丰富的操作模式(手动操作,软件命令操作)
-
支持所有主流三维 CAD 模型输入、输出
-
可开发性,采用离线应用平台可进行深度定制用户专用应用
-
尺寸小巧,高度方向上和鼠标一样的大小
在强大的配套软件辅助下能够胜任以下任务:
-
三维特征识别,完整的几何检测能力
-
自动化形位公差检测
-
快速对齐定位,位置姿态检测
-
无标志点的点云配准和曲面重建
-
曲面质量检测,特征分析
-
高品质质量检测报告
优势
-
静态物体的三维测量
-
精确的、快速的 3D数据测量
-
大视场
-
不受环境光影响
应用案例
在机器人3D 引导中的应用
基于激光扫描技术和 3D 物体识别技术开发的机器人 3D视觉引导系统,可对较大测量深度范围内散乱堆放的零件进行全自由的定位和拾取。相比传统的2D 视觉定位方式只能对固定深度零件进行识别且只能获取零件的部分自由度的位置信息,具有更高的应用柔性和更大的检测范围。可为机床上下料、零件分拣、码垛堆叠等工业问题提供有效的自动化解决方案。

光滑铝件

将大卫石膏模型放在转台上,然后使用激光扫描系统从各个角度测量,最后将测量的点云模型进行拼接,获得完整的大卫点云模型。转台每次旋转 45°,共旋转 8次,每次旋转后激光扫描系统将会扫描大卫模型,获取石膏像部分点云模型
部分现场图片

拼接后的大卫模型

产品系列
Laser Vison-1500D
Laser Vison-1500D 是一套大视场的快速三维测量系统,可以在 6-7s内快速完成场景的三维测量,测量深度 1500mm,精度为 0.3mm。将视觉系统固定好后,只需点击软件上的一
技术参数
特性

视频
联系邮箱:zhengzl@hust-wuxi.com
广告时间:
「3D视觉技术交流群」目前共总结与交流的主题包括如下:
一 2D视觉
1)相机标定
2)图像处理基础
3)相机与镜头
二 手眼标定
三 3D视觉
四 编程技巧
五 VSLAM技术
1)ubuntu系统
2)VSLAM
六 深度学习
七 结构光视觉
八 优化加速
九 读书笔记
十 其他
1)星球建设
2)工具与课件
这里,我们只侃技术
来源:3D视觉工坊
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!