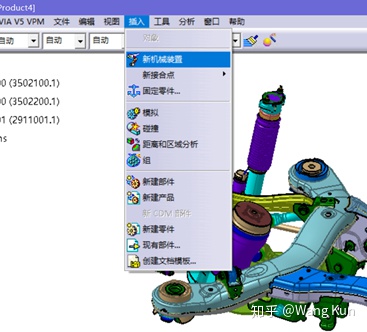

2.建立FIXED PART,图标

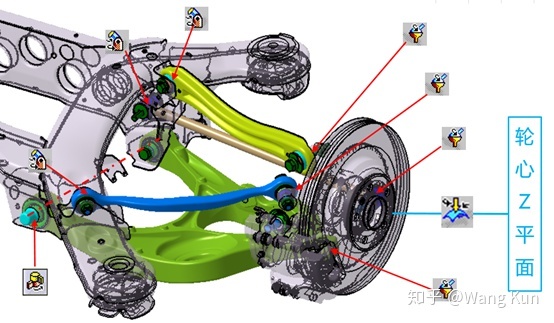
建立一个中间体“轮心Z平面”,中间体与FIXED PART的滑动副Prismatic并加驱动,此时DOF=0。
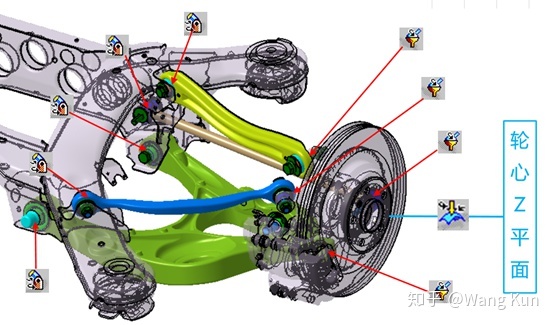
5.建立导向机构的运动副。注意这一点说的是导向机构,主要包括悬架的各个杆系,转向拉杆,麦弗逊悬架的减振器。不包括螺旋弹簧,稳定杆,驱动半轴,非导向机构的减振器等。同时建立一个轮边运动单元与轮心Z平面的点面运动副Point Surface。
6.转向拉杆内点与齿条建立约束,齿条与FIXED PART建立滑动副Prismatic并加驱动,此时,DOF=0。
7.弹簧运动副。将弹簧分为上下两段,分别与上下连接的部件使用万向节U Joint和球铰副Spherical约束,弹簧上下两段的采用滑动副Prismatic不加驱动。DOF=0
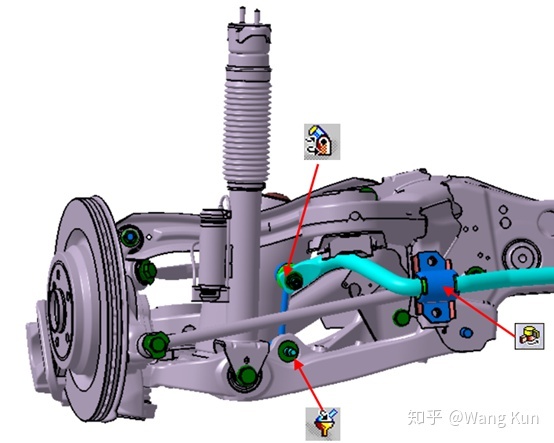
8.减振器运动副。同上DOF=0
9.稳定杆运动副。一般做法是将稳定杆从中间切开,与FIXED PART采用旋转副Revolute Joint不加驱动。稳定杆连杆与稳定杆采用万向节U Joint,与另一端连接采用球铰副Spherical,可以反过来。DOF=0
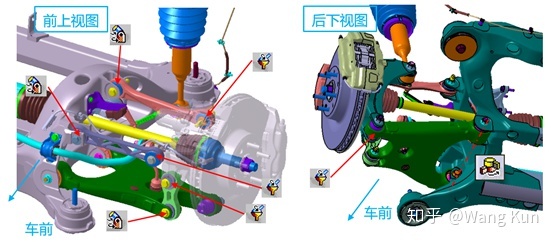
10.驱动轴运动副。这里说的是带三销轴式的移动节结构,另外轴上带滑动的结构不算。
如果不想模拟驱动轴的旋转,将固定节与转向节固连Rigid,固定节与轴杆采用万向节U Joint,轴杆与移动节轴线采用点线。此时移动节与FIXED PART采用固连Rigid。
如果想模拟驱动轴的旋转,那么将固定结与转向节旋转副Revolute Joint不加驱动,固定节与轴杆采用万向节U Joint,轴杆与移动节采用万向节U Joint,移动节与FIXED PART采用圆柱结合,滑动驱动不加,旋转驱动加。DOF=0
上面这一套下来,如果每一步都不出错,DMU模型基本都不会有问题。检验每一步是不是做到位就是看这一步的DOF是不是0。
举一些悬架的例子,比如:
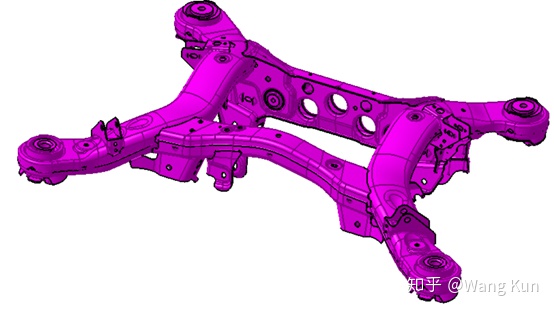
1.奔驰GLS 400后悬架
先上全景图
2.轮边机构
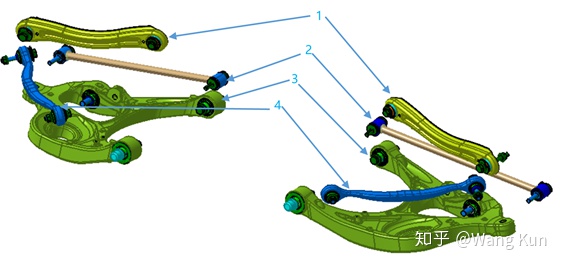
导向杆1,导向杆2,导向臂3,导向杆4.(为分门别类,都这么叫吧)
4.减振器,弹簧,稳定杆,驱动轴,此处不一一表述。
建模型过程:
1.如图1-4步
或者
万向节约束,能少用就少用,谁用谁知道。
3.7-8步
这个时候悬架模型基本搭完了。
对于悬架DMU中,减振器,弹簧,稳定杆,驱动轴的建模大都是大同小异,不同的是导向杆系的运动副建立方式。除了麦弗逊悬架:
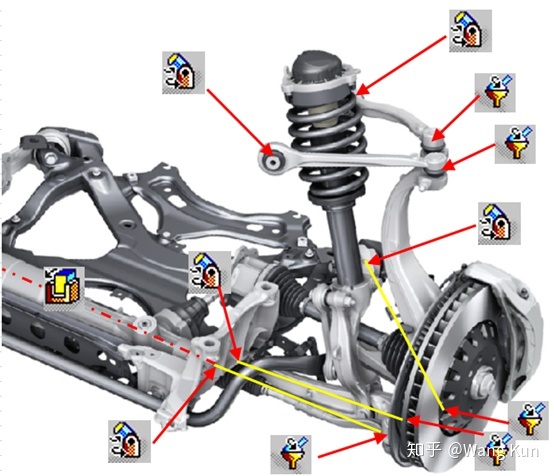
奥迪五连杆后悬架常用的运动副建立方式:
H臂有一种悬架自由度是不对的,因为有较大的衬套柔性变形,比如沃尔沃XC60 XC90 老款Q5后期有机会聊聊。
相关资源:欧德克连杆仿真设计软件Linkage_linkage软件-其它工具类资源-CSDN…
来源:weixin_39624733
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!