点击蓝字 关注我们
2020年上半年,受疫情阻碍,学生们在网络上合作交流,在云端上实践创新,积极配合学校和老师的安排,最终圆满完成了自己的云上创新实践作品。本期为2020年云上创新实践作品展示第二期,展示的是部分势能小车类创新制作项目。
势能小车类创新制作项目需要根据能量转换的原理,将重力势能转换为机械能,实现小车对重力势能的转换、自主行进、自动绕桩等功能。同学们利用三维软件建模,通过电子软件仿真模拟,独立设计出具有方向控制功能的自行势能驱动小车。
作品经过计算完成自主设计,用SolidWorks或其他三维软件进行完整图纸设计,并利用MATLAB软件进行运动轨迹仿真,有能力的同学已通过3D打印等加工设备完成整车制作。该项目重点培养了学生的虚拟设计能力、仿真软件使用能力,同学们在实际项目中锻炼了创新能力、实践能力以及团队合作能力。
势能小车类创新制作项目
01. S环形无碳小车
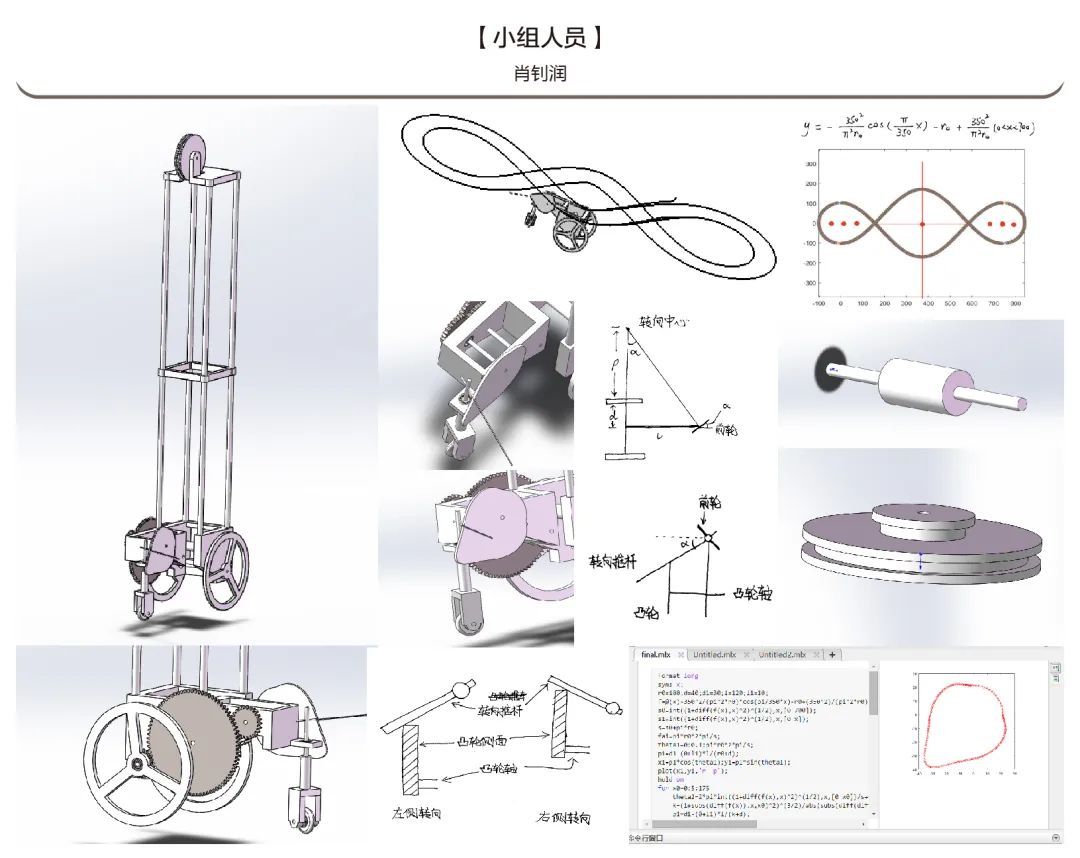

制作人姓名:肖钊润
作品简介:该小车通过重锤驱动和凸轮带动转向系统的方法,采用简单的凸轮-横推杆式转向机构,设计出自行实现双八字轨迹行走的小车。
03.势能驱动车
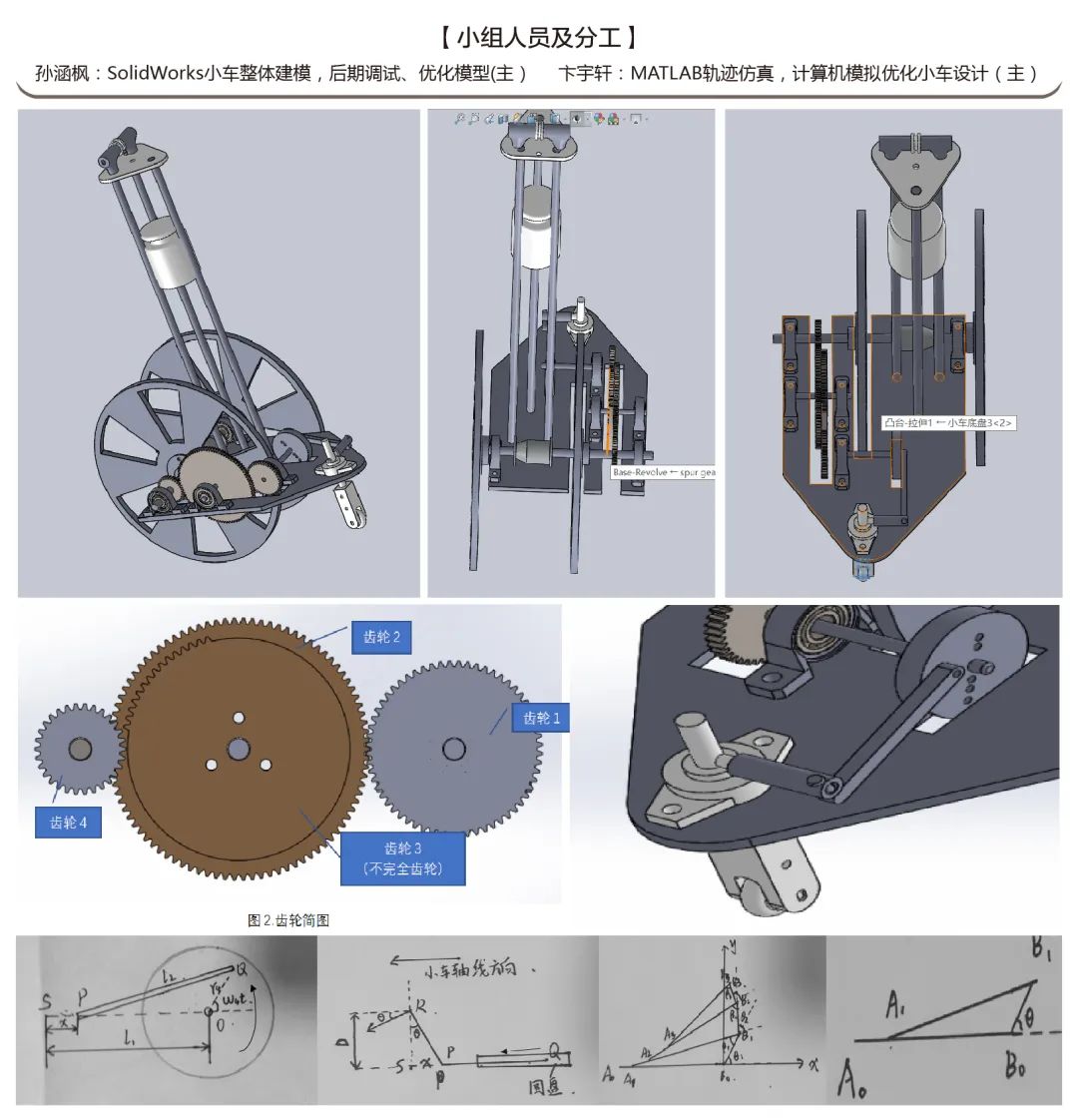
制作人姓名:孙涵枫、卞宇轩
作品简介:该作品采用锥形绕线轮为原动机构,调整绕线轴位置的粗细即可调整驱动力大小。此外,选用了齿轮为转动机构,通过控制前轮与车轴线之间的夹角实现转向,完成了S型运动轨迹行进。
05.势能小车
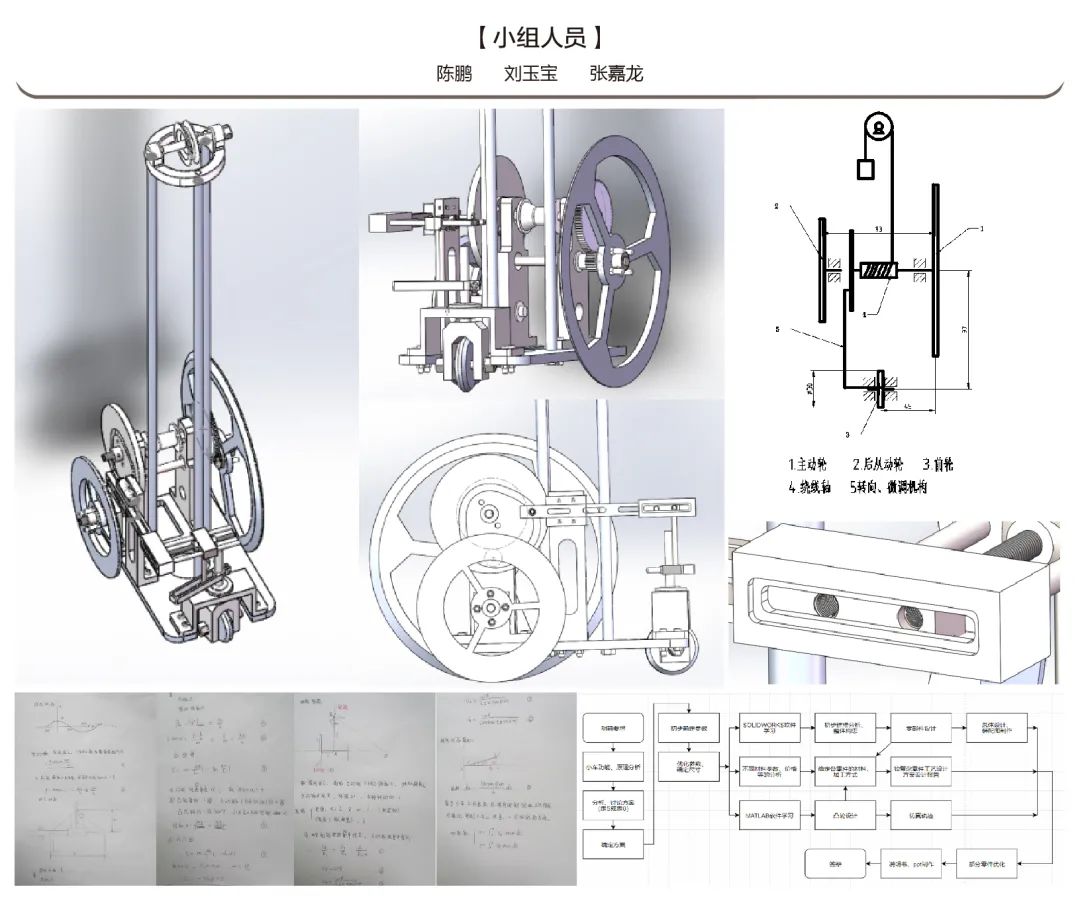
制作人姓名:陈鹏、刘玉宝、张嘉龙
作品简介:该作品选用单轮驱动,采用绳-绕线轴作为驱动力转换机构,通过凸轮达到转向效果,并设计了微调件、微调滑块与转向滑块等微调机构,能够精确控制S型运动轨迹。
07.势能驱动车
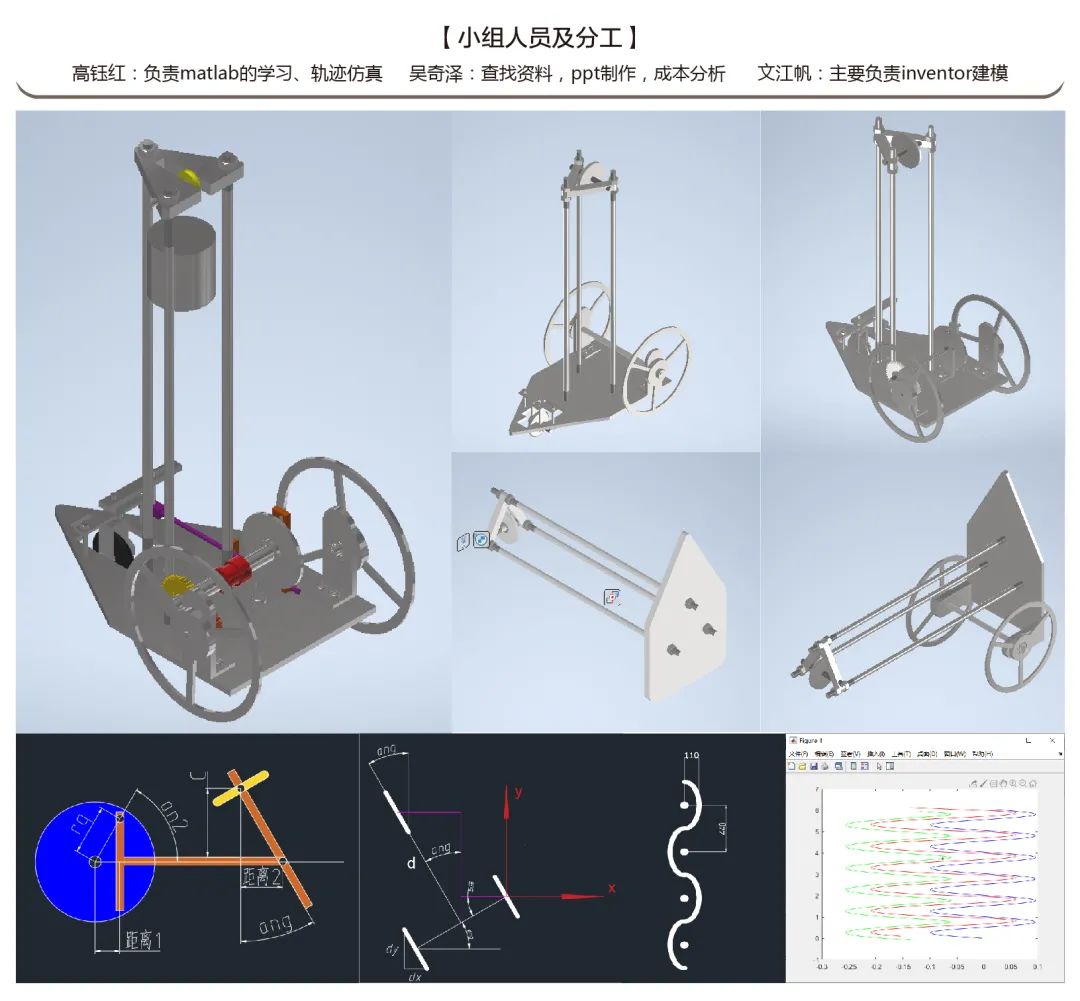
制作人姓名:高钰红、吴奇泽、文江帆
作品简介:作品采用三轮结构,车架为铝合金制的三角底板,采用绳轮结构和齿轮传动系统,使用曲柄滑块机构实现转向,并能够实现自主行进。
09.双“8”型势能小车
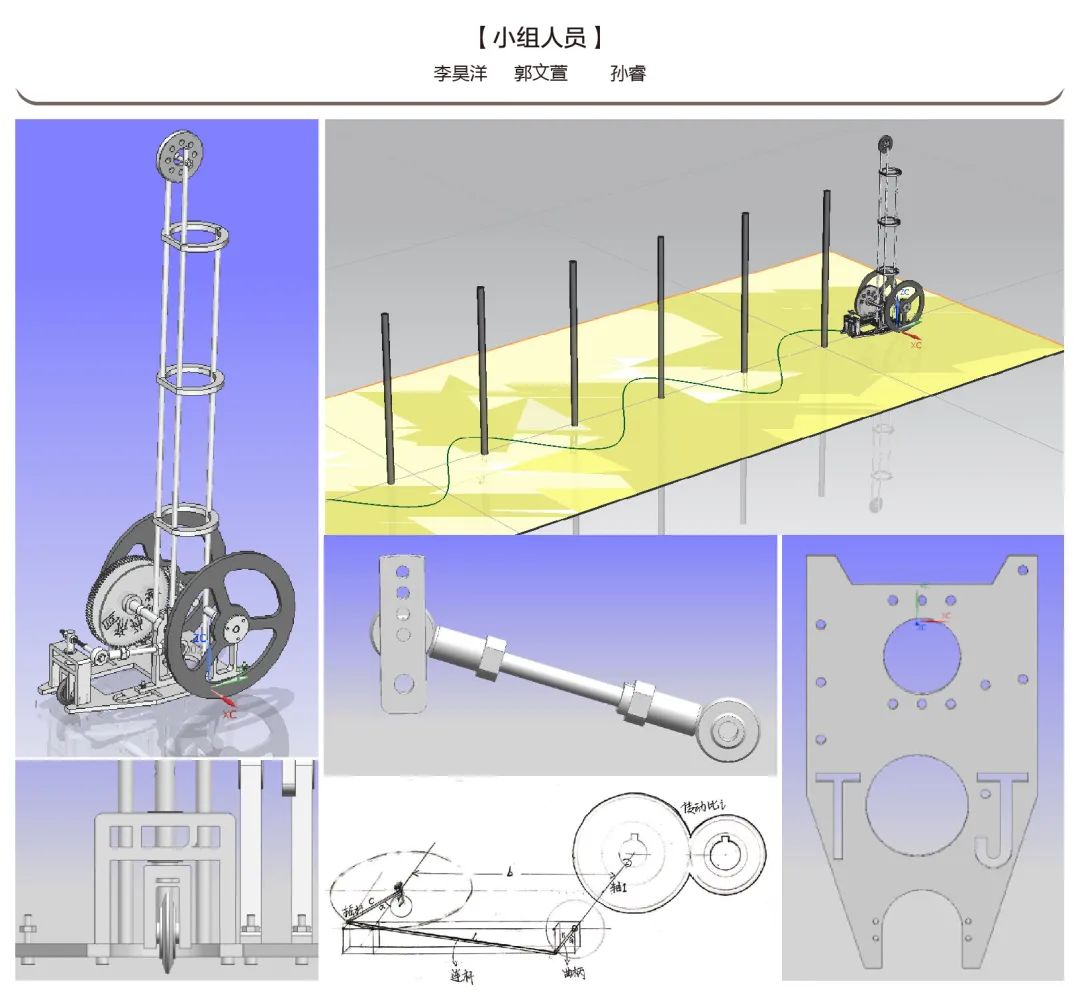
制作人姓名:李昊洋、郭文萱、孙睿
作品简介:该作品的车架为三角底板式,采用绳轮式结构,使用直齿轮作为齿轮传动,通过曲柄连杆和单轮驱动实现转向、差速,后期添加螺母螺钉为微调机构,最终能够精确控制S型运动轨迹。
11.S型势能小车

扫二维码|关注我们
同济大学工程实践中心
点一下“分享”,向好友展示这些优秀作品吧。
相关资源:陈式太极拳教学软件+注册机1-专业指导文档类资源-CSDN文库
来源:weixin_39520595
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!