硬件电路的设计
3.1系统的功能分析及体系结构设计
3.1.1系统功能分析
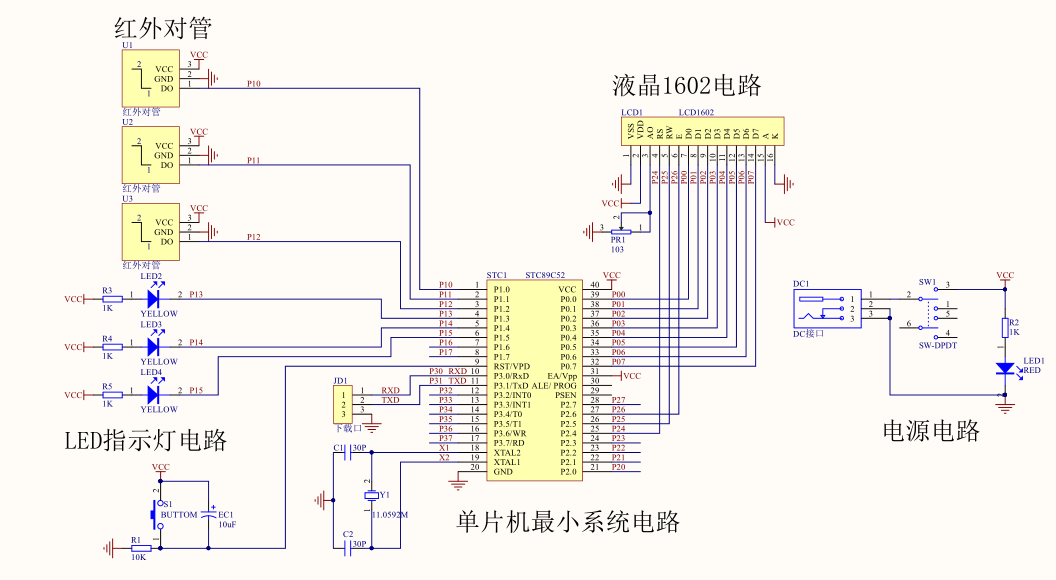
本设计由STC89C52单片机电路+红外对管传感器+LCD1602液晶显示电路+LED指示灯电路+电源电路组成。
1、通过红外对管模块实时检测车位是否占用,车位分为1车位,2车位,3车位。
2、液晶实时显示车位是否被占用、车位被占用数、空车位数,红外对管有检测遮挡距离近,表示停有车辆。
3、车位处是否停车并有状态指示灯指示。
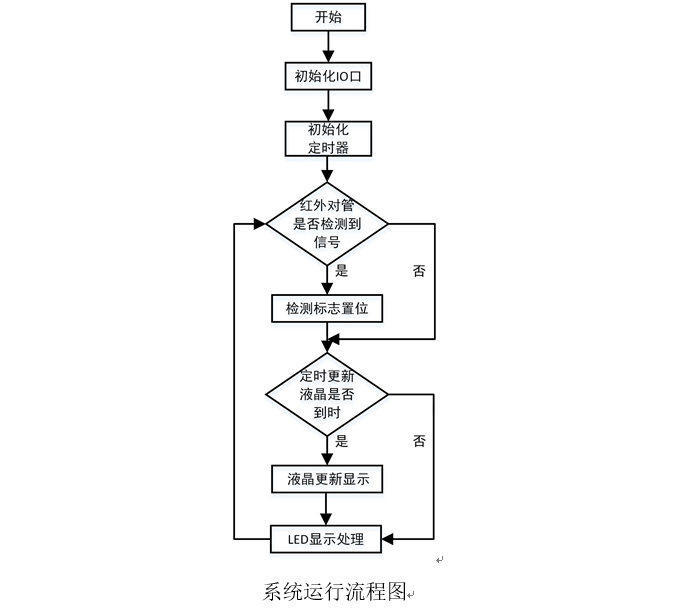
3.1.2系统总体结构
本系统具体框图如下图所示:

5V电源电路设计
本系统选择5V直流电源作为系统总电源,为整个系统供电,电路简单、稳定。DC为电源的DC插座,可以直接接USB电源线,一端插在DC插座上,另外一端可以插在5V电源上,如电脑USB、充电宝、手机充电器等等。LED为红色LED灯,作为系统是否有点的指示灯,电阻为1K电阻,起到限流作用,保护LED灯,以防电流过大烧坏LED灯。SW为自锁开关,开关按下后,红灯亮,此时系统电源5V直流输出。开关再次按下后,红灯灭,此时系统电源无5V电源输出。
HW红外避障模块电路设计
该红外避障传感器是基于红外对管模块的红外避障传感器。该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围 2~30cm,工作电压为3.3V-5V。该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障、避障小车、流水线计数及黑白线循迹等众多场合。
一、模块参数说明
(1)当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,该模块检测距离2~30cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
(2)传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键。其中黑色探测距离最小,白色最大,小面积物体距离小,大面积距离大。
(3)传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器;连接方式:VCC-VCC;GND-GND;OUT-IO。
(4)比较器采用LM393,工作稳定。
(5)可采用3-5V直流电源对模块进行供电。当电源接通时,红色电源指示灯点亮。
(6)具有3mm的螺丝孔,便于固定、安装。
(7)电路板尺寸:3.2CM*1.4CM
二、模块接口说明
(1)VCC 外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连
(2)GND 外接GND
(3)OUT 小板数字量输出接口(0和1)
红外避障模块内部电路图如下图所示,其中R1电阻为分压电阻,将红外避障传感器检测到的障碍信息转化为模拟电压信号,模拟量信号接入LM393比较器后,即可与LM393比较器芯片2号引脚所接的分压电阻分压后的模拟电压进行比较,进而得出DO数字信号(即高低电平信号)。C1、C2为滤波电容,C1电容对电源进行滤波,让电源输出更稳定。C2电容对模拟信号进行滤波,保证模拟信号输出的稳定性。R2、R3均为限流电阻,来保护LED灯,防止LED灯烧坏,LED灯均为低电平有效。R5也为限流电阻,保护红外发射头,以防烧坏。R4为上拉电阻,上拉就是将不确定的信号通过一个电阻钳位在高电平,同时起限流作用。保证LM393比较器输出的高低电平信号在与单片机引脚连接时电平信号的读取更加稳定。
.
链接:https://pan.baidu.com/s/1sNTuS3SW8pQv54P7e4or9Q
提取码:0zh9
.
来源:weixin_47527181
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!