问题:机器人的移动,对于障碍物的识别,机器人的定位,
主要是机器人的设计组装和内部程序的设计,分为硬件和软件:
软件:会使用51或其他的单片机,能够用C语言或其他语言进行编程,学会控制步进电机;
硬件:学过电子技术,懂得模电和数电的知识,会用一些电路和芯片、模块搭出电路达到想要的功能。机械:有基本的制图能力。
在制作机器人的过程中需要用到的有开发板:如C51(C)、STM32(C、C++)、Arduino、还有很流行的FPGA(Verilog、Python)。软件有KEIL(C51)、VS、语言编辑器、VIVADO
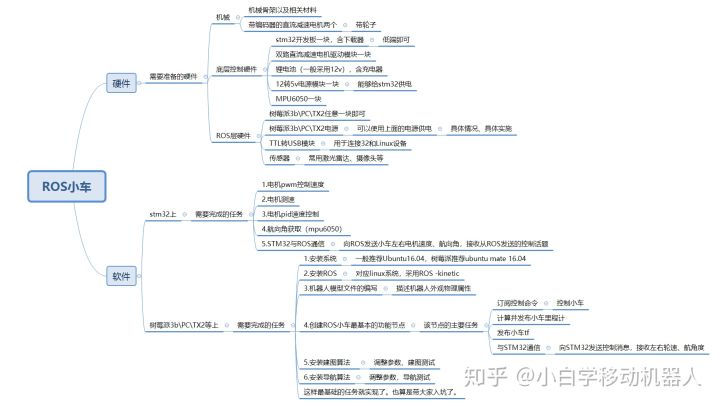

—在网上扒的学习思维导图
名词解释
ROS
推荐书籍—来自知乎,也可以自己找一些
综合入门:
-
Johan J. Craig, 《机器人学导论》, 工业出版社。(英文《Introduction to Robotics – Mechanics and Control》)
-
蔡自兴,《机器人学(第三版)》,清华大学出版社
编程基础:
-
Stephen Prata,《C Primer Plus 第6版 中文版》, 人民邮电出版社
-
Mark, Allen, Weiss,《数据结构与算法分析 C语言描述(原书第2版)》, 机械工业出版社
-
胡晓冬,《MATLAB从入门到精通 (第2版)》,人民邮电出版社
-
张若愚,《Python科学计算(第2版)》,清华出版社
-
Larry Nyhoff, 《数据结构与算法分析-C++语言描述(第2版)》,清华大学出版社
…
更多,来自知乎
来源:czc131
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!