

2 实现的一些细节
1、直流有刷电机的底层驱动:底层运动控制是用STM32板控制的,其与驱动器通信实现间接控制电机。具体45°的麦轮正逆解算法的资料网上也很丰富。
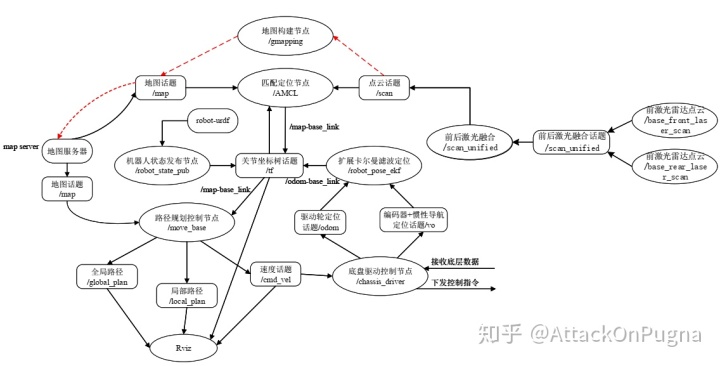
2、ROS与STM32的通信:图3中/chassisdriver是本方案实现ROS与STM32通信的节点,其主要实现底层驱动下发及底层数据的接收(里程计数据),具体就是/move_base的速度消息,也就是/cmd_vel数据通过这个节点传输给STM32板,最终实现麦轮的运动控制;电机的编码器数据通过驱动器反馈给STM32板,最终也是通过这个节点输入给ROS上位机的,也就是/odom数据。这一部分网上参考也有一些,结合自己使用的32板有的通信协议去写,特别注意波特率一致否则数据是会出问题的。
3、自制的机器人在ROS下URDF建模:利用solidworks下有一个叫“sw_urdf_exporter”的插件建模,添加各部分关键的旋转轴以及坐标中心。注意在雷达部分对两个雷达坐标的分别命名,与启动雷达节点中的坐标要对应上,这也体现了ROS中TF的重要性,每一个坐标变换都要注意,base_link的坐标位置等等(这都会对你的避障导航路径产生影响)。试想一下 如果你前后雷达的坐标系搞反了还能建出正确的地图吗/p>
3 闲谈
做激光SLAM到现在,翻看一些国内外的论文会发现有很多问题在心里懵懵懂懂的,贝叶斯滤波尔曼滤波展卡尔曼滤波束模型然域模型尔可夫定位据栅格定位特卡洛定位里推荐一本书可以参考《概率机器人》你会发现这些问题的答案都在这本书里,当然能啃起来还是有点费劲,里面各种假设反正就是有点秃然,头很冷。不过激光SLAM似乎也到了瓶颈了,大家更多的好像都奔赴到视觉SLAM当中,这几年相机的低成本优势促使视觉SLAM的快速发展,不管你做视觉还是激光,其中有些东西是互通的,共勉之。
4 结束的广告
以上是本人目前硕士期间的项目经历中提炼出来的一些关键技术总结,如有不足,还请多多包含。这里给自己实验室打打广告,本人就读广州华南理工大学机械与汽车工程学院,实验室零几年开始做AGV的开发,目前已成功开发磁导式的AGV已投入商用,其中包括主控制器、驱动器、磁导传感器PCB、上位机调度程序的开发。另外,还在做图像处理,机器人移动抓取搬运等相关研究,实验室硬件器材齐全,欢迎各位有兴趣的同学可以私聊我加入到实验室一起学习一起进步!
相关资源:滚齿机速查挂轮软件2.1版本.zip_插齿机挂轮计算软件-制造文档类…
来源:weixin_39558317
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!