jetson nano 配置pytorch和torchvision环境+tensorrt模型转换+Deepstream部署yolov5(亲测可用)
文章目录
- 前言
- yolov5是什么/li>
- 环境
-
- 1.所需硬件
- 2.软件环境
- 步骤
-
- 一、烧录Jetpack 4.5.1镜像
- 二、安装Deepstream 5.1
- 三、安装torch环境
- 四、将Pytorch模型转化为wts文件
- 五、将wts文件转换为tensorrt 模型
- 六、编译nvdsinfer_custom_impl_Yolo文件
- 七、测试模型
- 总结
前言
因为一次比赛接触到了jetson nano,需要使用pycharm训练自己的模型加上yolov5进行目标检测,并部署到jetson nano上,直到比赛结束也没有搞出来,后来jetson nano开始吃灰,后来因为大创需要重新开始了我的yolov5部署之路。网上资料断断续续,不是太清晰,也有太多的坑和bug,在环境配置中跌跌撞撞好几天,最后实现了目标检测,因为踩了太多的坑,于是决定写下这篇博客记录我与jetson nano和yolov5的相爱相杀。
此篇文章并不是我的原创,是我结合csdn上许多优秀博主的github上的一些优秀资源写下来的。链接我放在了最后,再次感谢这些博主给予的帮助。
以下是本篇文章正文内容,希望可以帮助大家顺利打开Yolov5的大门。
yolov5是什么/h1>
YOLO之父Joseph Redmon在今年年初宣布退出计算机视觉的研究的时候,很多人都以为目标检测神器YOLO系列就此终结。
然而在4月23日,继任者YOLO V4却悄无声息地来了。Alexey Bochkovskiy发表了一篇名为YOLOV4: Optimal Speed and Accuracy of Object Detection的文章。
YOLO V4是YOLO系列一个重大的更新,其在COCO数据集上的平均精度(AP)和帧率精度(FPS)分别提高了10% 和12%,并得到了Joseph Redmon的官方认可,被认为是当前最强的实时对象检测模型之一。
正当计算机视觉的从业者们正在努力研究YOLO V4的时候,万万没想到,有牛人不服。
6月25日,Ultralytics发布了YOLOV5 的第一个正式版本,其性能与YOLO V4不相伯仲,同样也是现今最先进的对象检测技术,并在推理速度上是目前最强。

格式化之后一定要弹出U盘,在进行烧录,不要直接烧录(亲自踩坑!!)
烧录软件使用的是win32Disk

八、调用usb摄像头进行检测
修改deepstream_app_config.txt文件
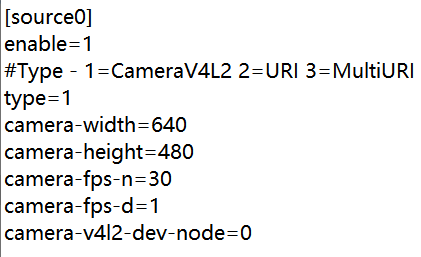
运行

运行帧率大概只有5帧左右,查阅相关资料后发现pytorch模型转换不会优化jetson nano底层转换代码,我使用onnx模型转换做到了25帧左右,基本可以进行实时检测。优化算法稍后我会继续写一篇博客。
总结
现在是凌晨一点钟,我写下这篇博客是为了记录自己部署yolov5的经历与过程,希望在我之后部署yolov5进行目标检测的同学能够更加顺利,同时开启我的博客之路,以后我也会将自己学习到的一些东西写下一篇篇的博客记录下来。
以下附上各位优秀博主的链接,再次感谢你们。
(https://blog.csdn.net/qq_40305597)
(https://blog.csdn.net/IamYZD)
文章知识点与官方知识档案匹配,可进一步学习相关知识Python入门技能树人工智能深度学习208576 人正在系统学习中
来源:我与nano
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!