简易介绍机械臂软件点位操作
在机械臂第二个标签(Points),在表格中间点击鼠标右键添加(Add)删除(Remove)点位,可以保存之前记录的点位(Save),可以方便移动到之前的点位(选中要移动的点的那一行,然后鼠标左键长按MoveTo)
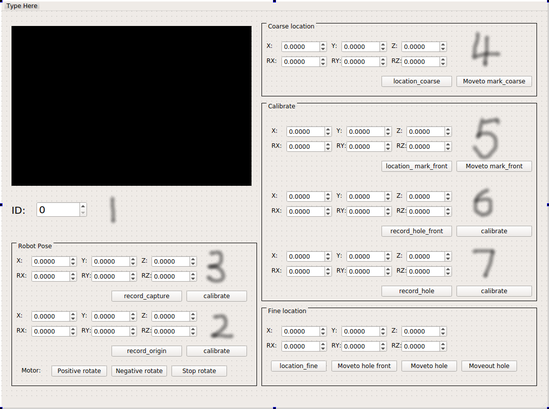

注意:可以用机械臂保存示教时的每一个位姿,以防止需要重新来过。移动代表要用机械臂软件控制移动机械臂。
开始示教
1
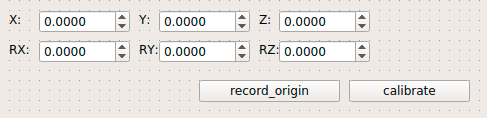
2.1-移动机械臂至合适姿态,采集机械臂初始姿态(record_origin)->
2.2-保存机械臂初始姿态(calibrate)->
3
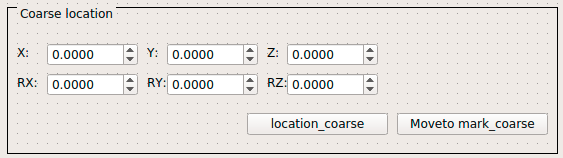
4.1-粗定位(location_coarse)->
4.2-运动至粗定位位置(Moveto_mark_coarse)->
5
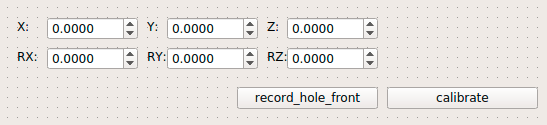
6.1-移动机械臂至孔前,并采集机械臂当前位置(record_hole_front)->
6.2-保存机械臂在孔前的位置(calibrate)->
7
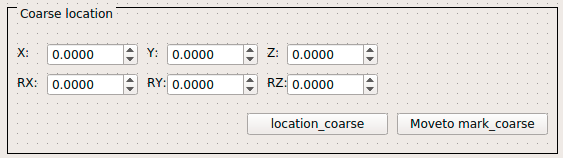
2.1->粗定位(location_coarse)
2.2->移动至粗定位位置(Moveto_mark_coarse)
3
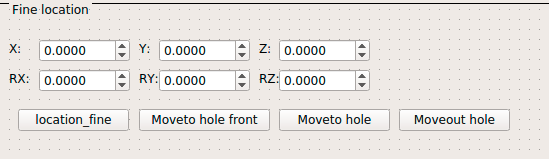
3.1->精定位(location_fine)
3.2->移动机械臂至孔前(Moveto hole front)
3.1->移动机械臂至孔内(Moveto hole)
3.2->移出机械臂至孔外(Moveoout hole)
来源:COCO_PEAK_NOODLE
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!