ROS学习—–基于ubuntu16.04运用Gazebo仿真软件搭建室内环境目录
- 一、打开gazebo,进行环境搭建
-
- 1、运行gazebo仿真软件
- 2、进行环境搭建
- 二、gazebo模型保存
-
- 1、将上面搭建好的模型进行保存
- 2、修改model.config文件,加入我们自己的备注,如下所示:
- 三、配置launch文件,通过运行该文件打开刚刚创建的模型
-
- 1、打开终端,运行gazebo
- 2、在insert中找到刚刚创建的模型,保存模型的world文件
- 3、在[mbot_gazebo]功能包下的launch文件夹创建模型启动文件
- 4、程序编译
ubuntu版本:ubuntu16.04
仿真软件:gazebo
之前博客是建立在文件的基础上搭建我们的仿真环境,而一直没有运用gazebo进行仿真环境的搭建,本次博客,林君学长就带大家运用gazebo来搭建自己的室内环境,并且保存为我们的launch文件,为我们后续可以继续搭建
一、打开gazebo,进行环境搭建
1、运行gazebo仿真软件
1)、打开终端,输入以下命令,运行gazebo
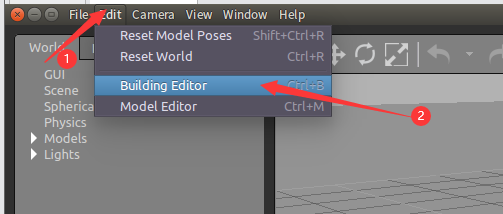

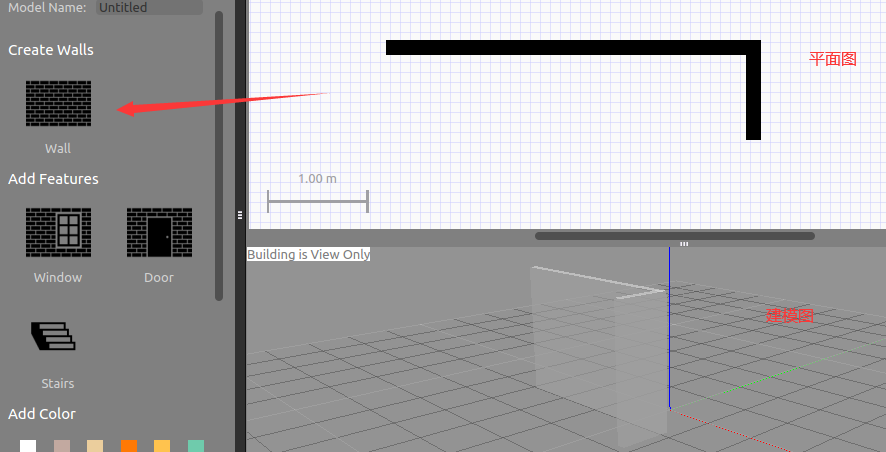
2)、进入搭建环境,通过添加窗户、墙、楼梯、门进行我们的环境搭建
点击平面图上的材料,点击右键,选择open Wall Inspector,进行各个参数的修改:
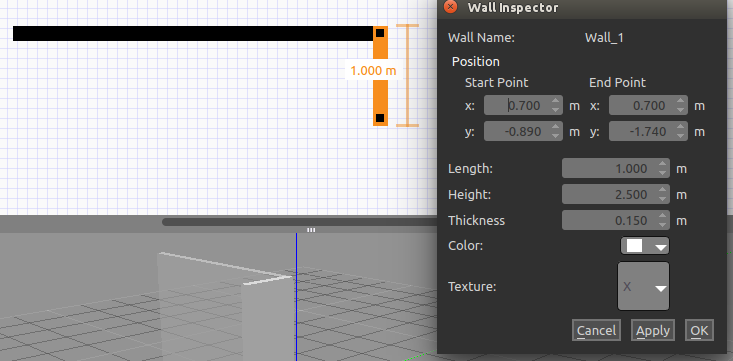
这些参数大家都看得懂,就不用解释了哈!
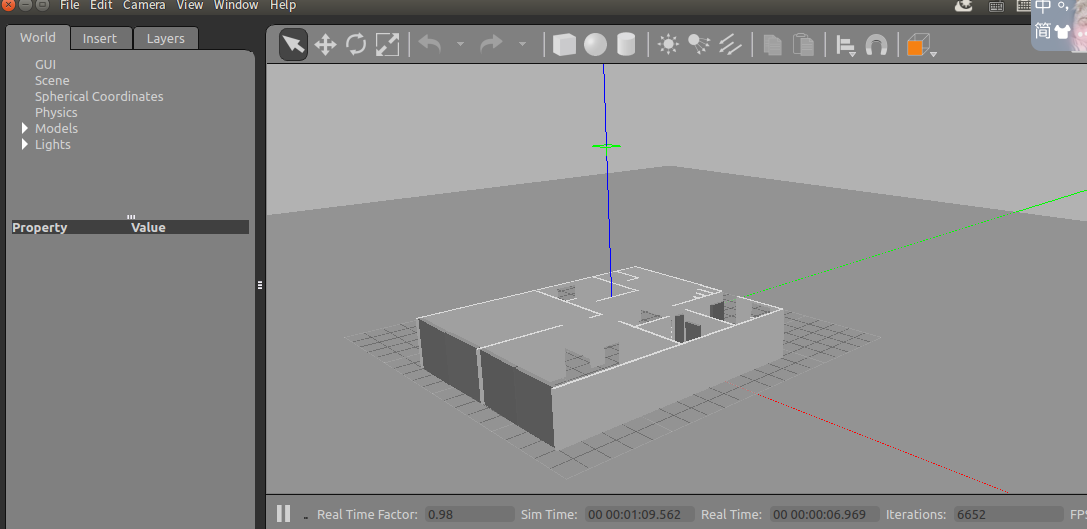
4)、同理,门、窗、阶梯都是这样搭建的,修改参数也是如上步骤,这里就不给出讲解了,下面给出林君学长自己搭建的室内环境的平面图及建模图
平面图如下:

到这里,我们的室内环境的模型就搭建OK了,现在我们保存我们的模型!
二、gazebo模型保存
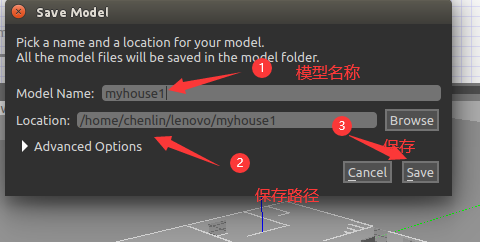
1、将上面搭建好的模型进行保存
1)、点击界面的[file->Save As],浏览选择自己需要保存的路径,然后保存就好:
3)、找到路径,查看保存的模型,如下所示:
2、修改model.config文件,加入我们自己的备注,如下所示:

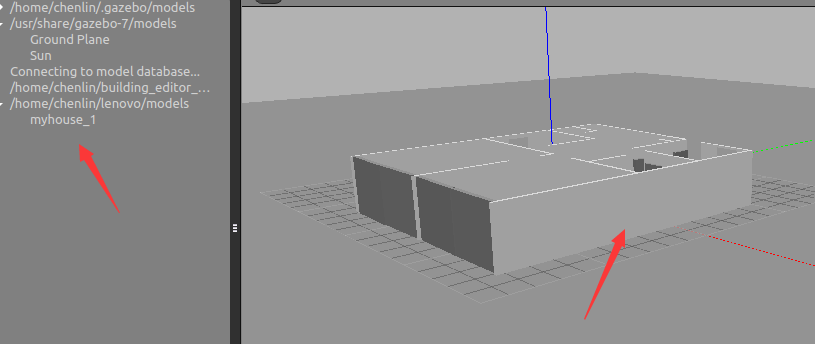
2、在insert中找到刚刚创建的模型,保存模型的world文件
1)、在insert中找到创建的模型
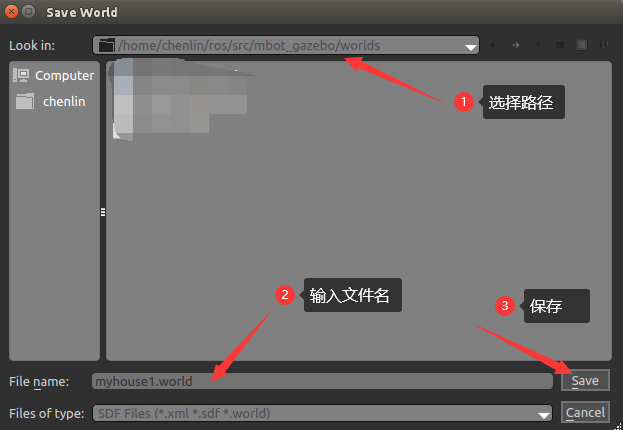
3)、点击左上角[File->Save World As],保存我们的world文件
3、在[mbot_gazebo]功能包下的launch文件夹创建模型启动文件
1)、新建终端,进入功能包下的launch文件夹
2)、创建模型启动文件myhouse1.launch

修改完成之后点击保存后关闭!
4、程序编译
1)、进入ROS工作空间
2)、代码编译
成功编译如下所示:
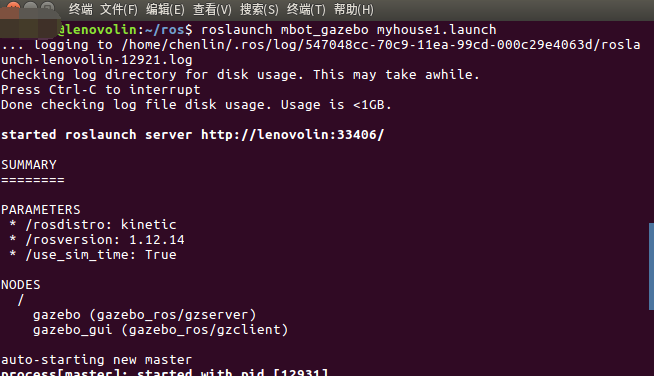
5)、运行的结果如下所示:
这里,我们运用gazebo进行室内环境搭建的整个过程就完成啦,是不是很简单呢,小伙伴们赶快运行gazebo进行搭建吧!
以上就是本次博客的全部内容,希望对本次博客的阅读,可以让小伙伴们更加熟悉的掌握gazebo环境搭建的用法哦!遇到问题的小伙伴,评论区留言,林君学长看到会给大家解答的,这个学长不太冷!
陈一月的又一天编程岁月^ _ ^
文章知识点与官方知识档案匹配,可进一步学习相关知识CS入门技能树Linux入门初识Linux24898 人正在系统学习中
来源:陈一月的编程岁月
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!