webots建立四连杆机构模型
- 使用webots内置的插件构建四连杆机构
-
- 建立robot形状
-
- 参考文献
使用webots内置的插件构建四连杆机构
首先,可以去官网下载最新的webots,网址:https://www.cyberbotics.com/,软件已经免费使用,一键下载,一键安装。
建立robot形状
使用索引建立一个new_world


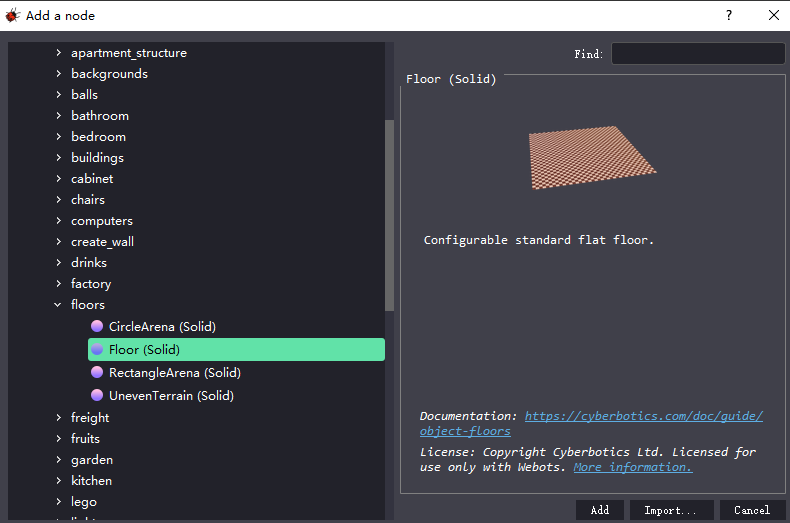
PROTO nodes(Webots Projects)>objects>floors>Floor(Solid),如下图
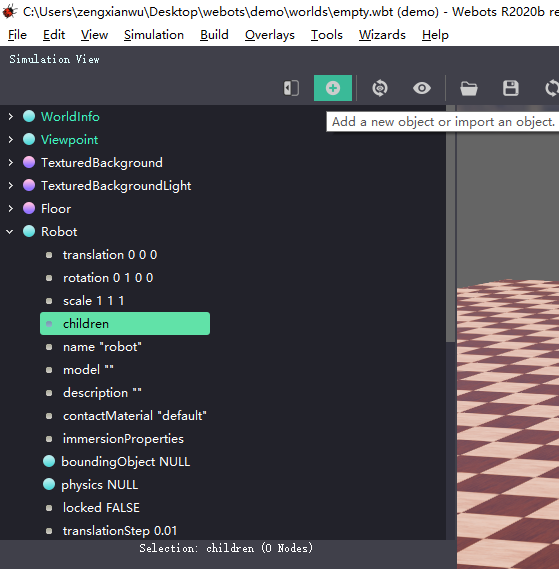
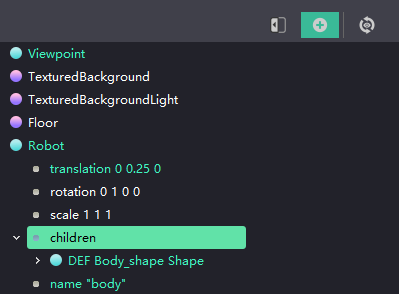
然后同样点击”+”号,添加一个Base nodes>Robot
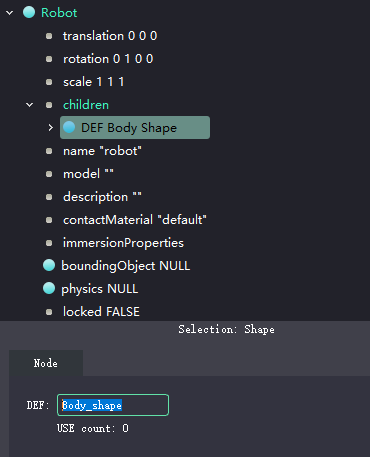
然后在Base nodes里面选择Shape
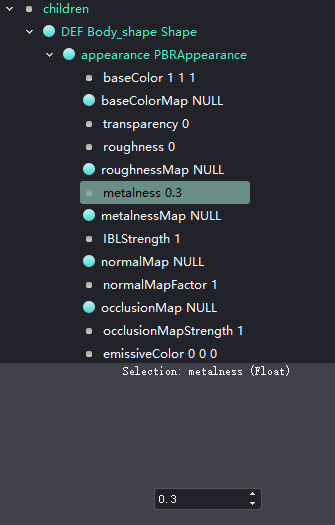
然后双击appearance NULL选中Base nodes>PARAppearance,单击Add
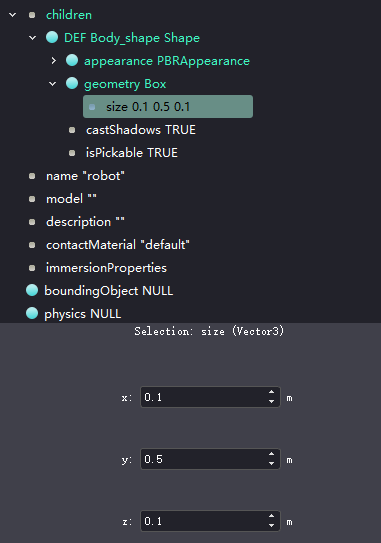
双击geometry NULL,增加Base nodes>Box就行(长方体)。
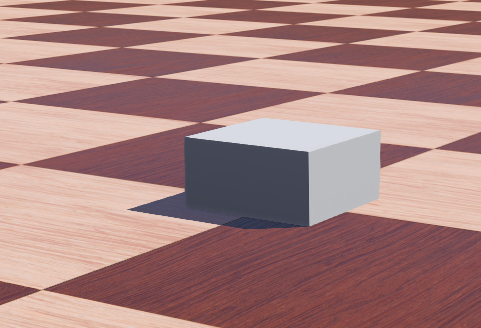
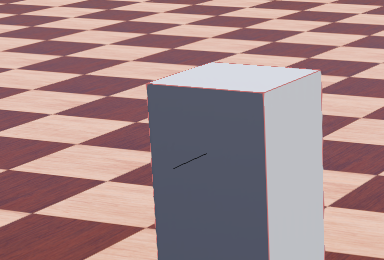
设置显示坐标轴,使用快捷键Ctrl+F1。添加后效果如下图。
将body向上平移(拔出floor)
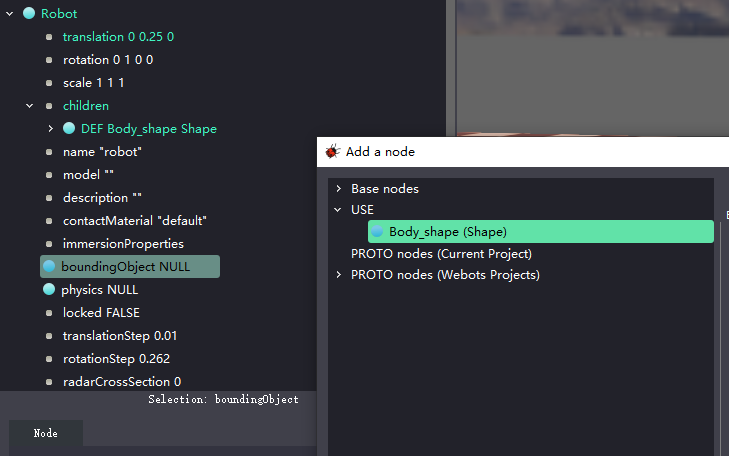
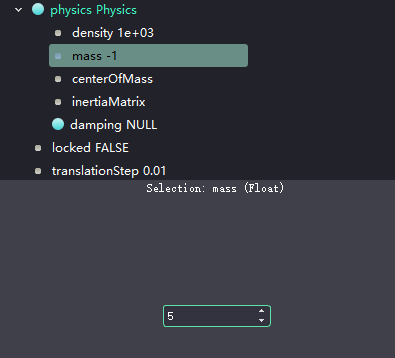
增加物理属性,双击physics NULL,直接使用默认的Base nodes的Physics就行,单击Add。

及时保存。
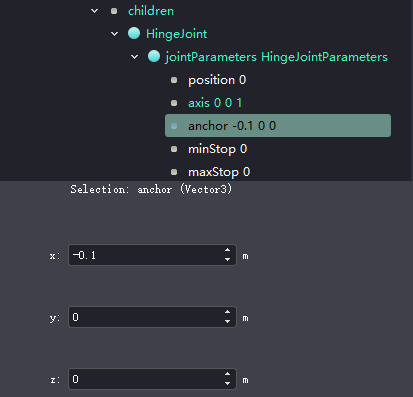
选择铰接,然后单击Add
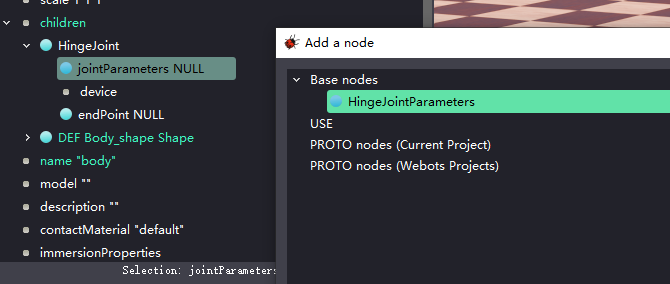
将axis改为Z轴 0 0 1 将铰链轴所在位置改为0 0.2 0.05
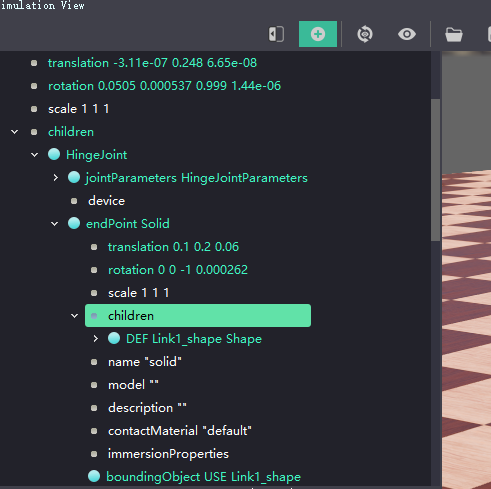
双击endPoint NULL增加一个Base nodes>Solid
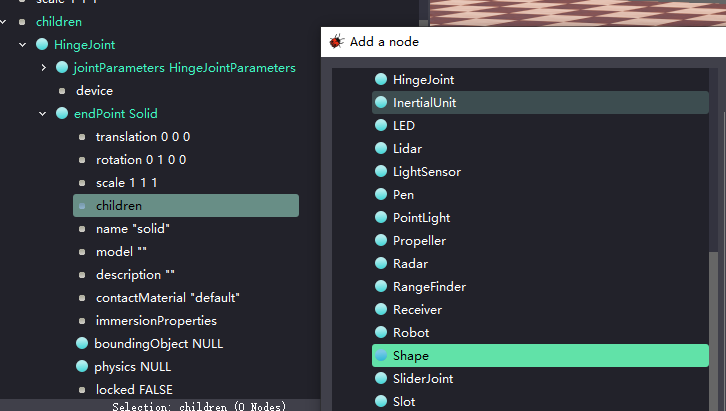
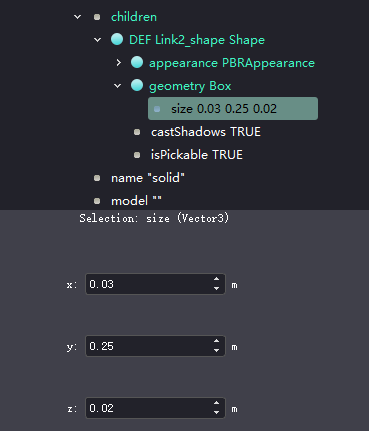
按照之前修改body的shape的方法修改appearance和geometry的size。并且将Shape改成Link1_shape

移动link1,修改endPoint的translation 为0.1;0.2;0.06,
同样的方法添加第三跟连杆link3

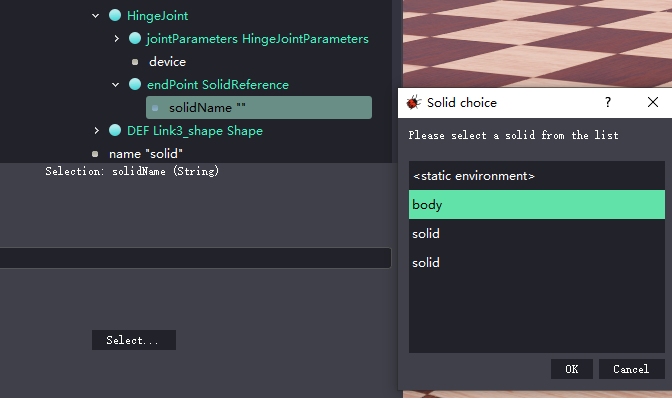
在endPoint中添加一个SolidReference。
抓紧保存一下
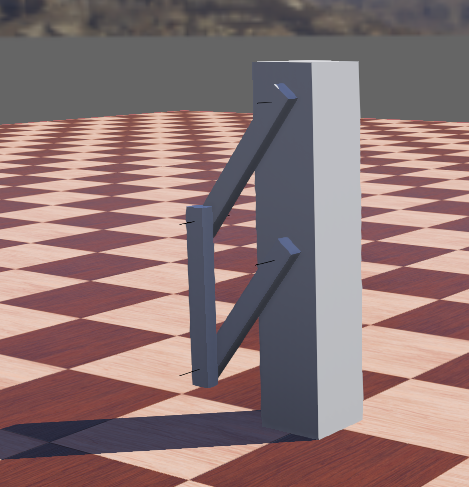
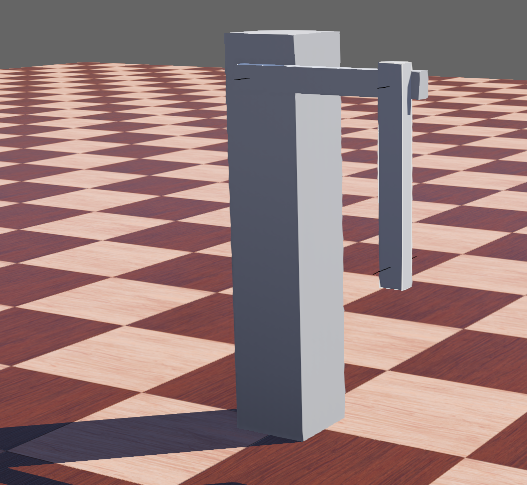
下面可以使用播放按键跑一下

至此,四连杆机构已经完成完成。
本工程文件已经打包上传,地址连接:https://download.csdn.net/download/xian_z/12917747
在近期,不想花积分下载的朋友可以给我留下邮箱,我看到后尽量发给你,大家都在忙着学习,我一定不能及时看到的。
——–山东大学机器人研究中心某人
参考文献
[address]https://www.cyberbotics.com/
来源:xian_z
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!