DELMIA软件 机器人与行走轴的导入与配置
本期分享一下Delmia软件中仿真机器人与行走轴之间的添加与配置。
一、机器人行走轴的导入
在
 “Device Task Definition”模块下进行操作,如果机器人与行走轴资源非DELMIA软件机器人库内,为外部创建的,则需要点击“Insert Resource”命令,导入机器人与行走轴的资源。
“Device Task Definition”模块下进行操作,如果机器人与行走轴资源非DELMIA软件机器人库内,为外部创建的,则需要点击“Insert Resource”命令,导入机器人与行走轴的资源。
此次分享用的资源为DELMIA机器人库内的资源,在左侧工具条中的 “Catalog Browser”工具上,从软件的机器人库中导入机器人与机器人行走轴,以川崎KAWASAKI机器人系列中的机器人BX165L与行走轴UZ100-C001.3000为例进行分享。
“Catalog Browser”工具上,从软件的机器人库中导入机器人与机器人行走轴,以川崎KAWASAKI机器人系列中的机器人BX165L与行走轴UZ100-C001.3000为例进行分享。

二、机器人安装到行走轴上
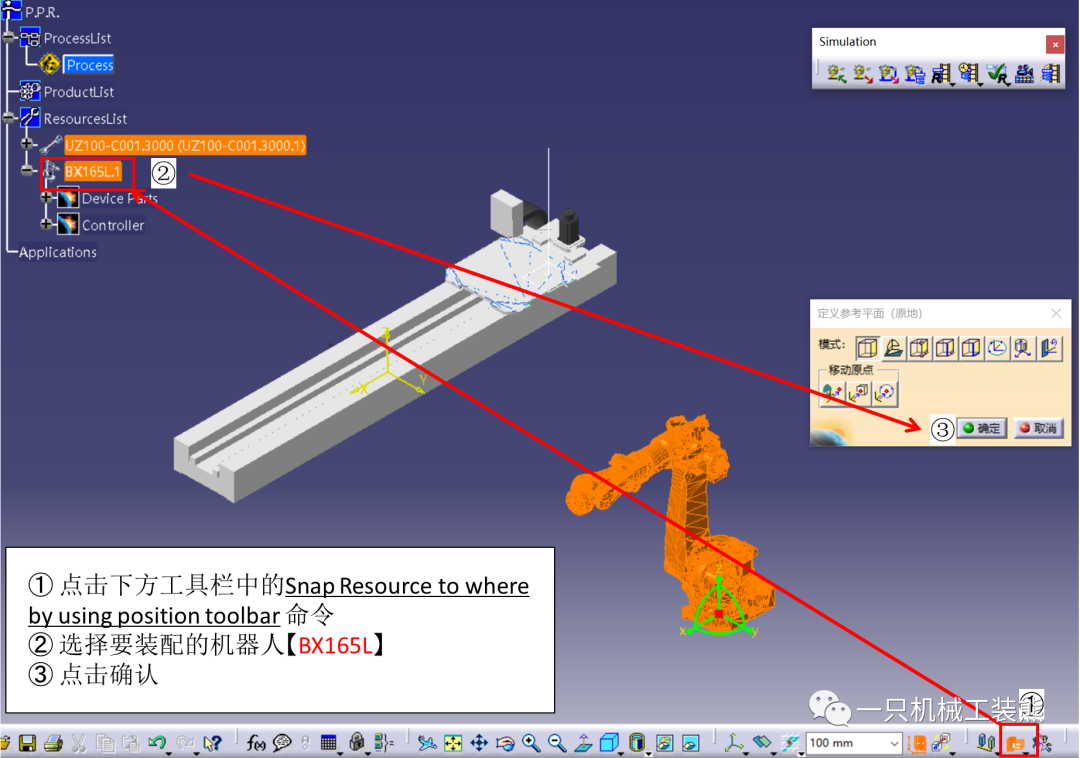
 “Snap Resource to where by using position toolbar”命令,将机器人装配上行走轴滑板上。
“Snap Resource to where by using position toolbar”命令,将机器人装配上行走轴滑板上。 装配操作说明:安装机器人时选取的安装参考坐标系如下图所示,机器人行走轴主要由行走轴滑板与行走轴导轨组成,通常情况下行走轴的滑板上都会有安装参考对象(如定位孔、定位销等)。此次选取的行走轴滑板与机器人安装参考对象为自身原点坐标系,安装时一定要让机器人的Base中心与行走轴滑板的中心重合。
步骤如下:
 2、使用“附加”命令,为机器人与行走轴滑台之间添加父子级关系,以便于机器人能够跟随行走轴滑台一同运行。
2、使用“附加”命令,为机器人与行走轴滑台之间添加父子级关系,以便于机器人能够跟随行走轴滑台一同运行。
步骤如下:

三、机器人与行走轴的配置
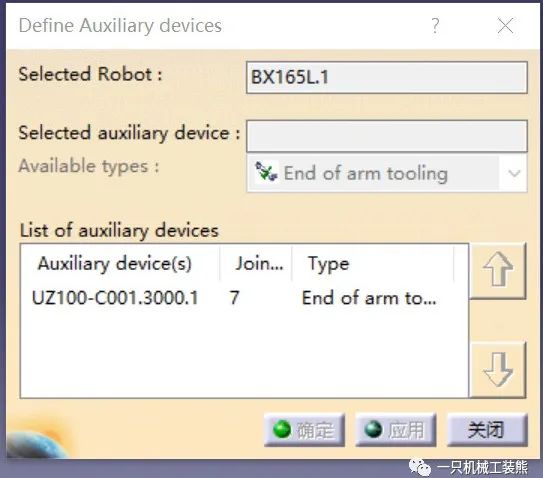
 命令按钮,弹出Define Auxiliary devices对话框。
命令按钮,弹出Define Auxiliary devices对话框。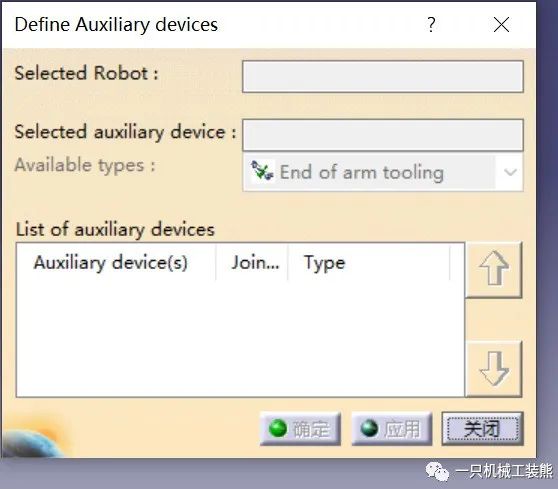
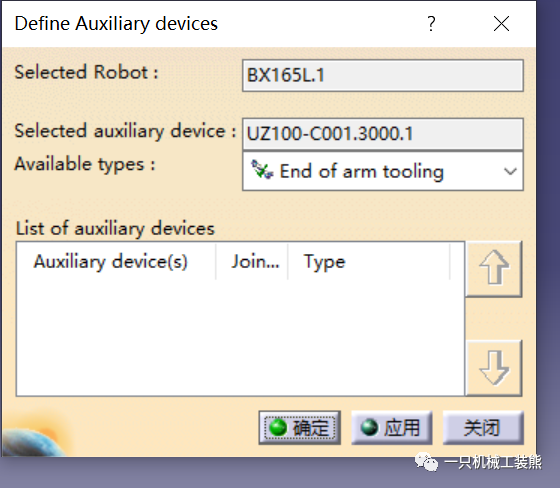
2.左侧图形树中分别点选机器人BX165L.1与机器人行走轴UZ100-C001.3000,Available types点选“End of arm tooling”选项,即行走轴作为机器人的外部轴。
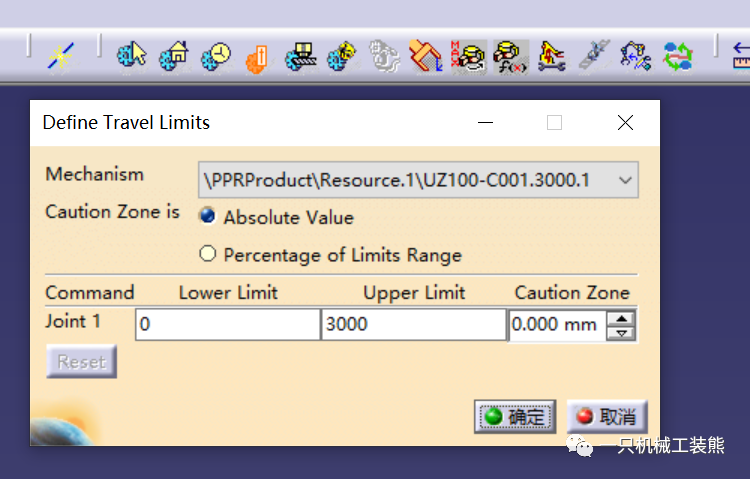
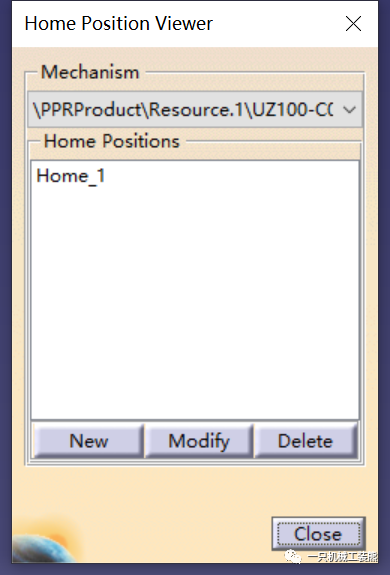
4.行走轴自身的参数也可以进行配置,如行走轴原点位置、行走轴行程等。在图形树中双击机器人行走轴UZ100-C001.3000,软件切换到“Device Building”模块。使用Device Attributes工具条中的 “Travel Limits”命令可以设置机器人行走轴的行程,使用“Home Poisitions”命令可以设置机器人行走轴的原点、相应需求位置,可根据需要自行追加配置。
“Travel Limits”命令可以设置机器人行走轴的行程,使用“Home Poisitions”命令可以设置机器人行走轴的原点、相应需求位置,可根据需要自行追加配置。
5.参数配置完成后,双击左侧图形树中ProcessList下的工艺文件Process,软件切换回“Device Task Definition”模块。
至此,机器人与行走轴的导入与配置就完成了。
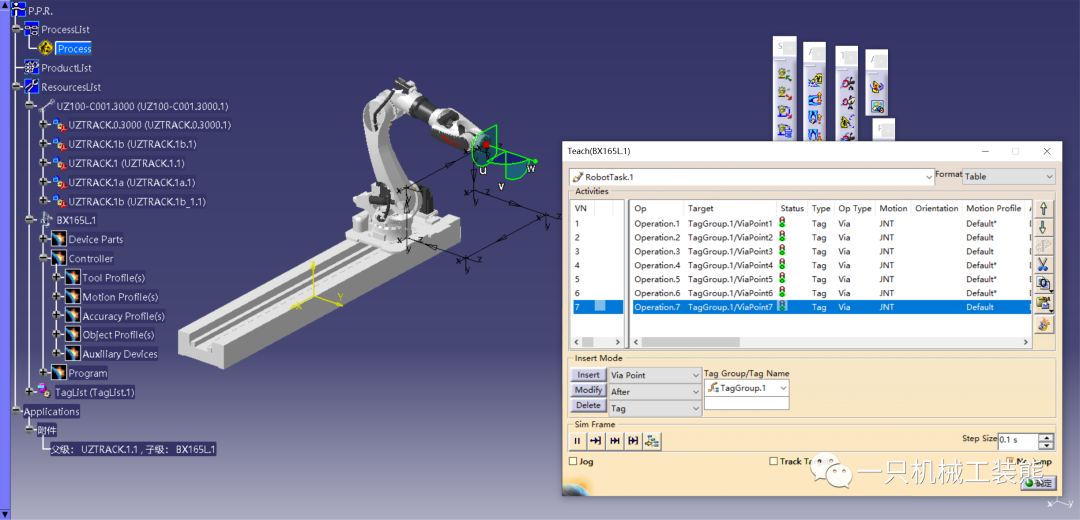
四、机器人示教编程
 “New Task”命令为机器人创建新任务,然后在Robot Management工具条中的“Teach a device”命令对机器人与机器人行走轴进行示教编程。
“New Task”命令为机器人创建新任务,然后在Robot Management工具条中的“Teach a device”命令对机器人与机器人行走轴进行示教编程。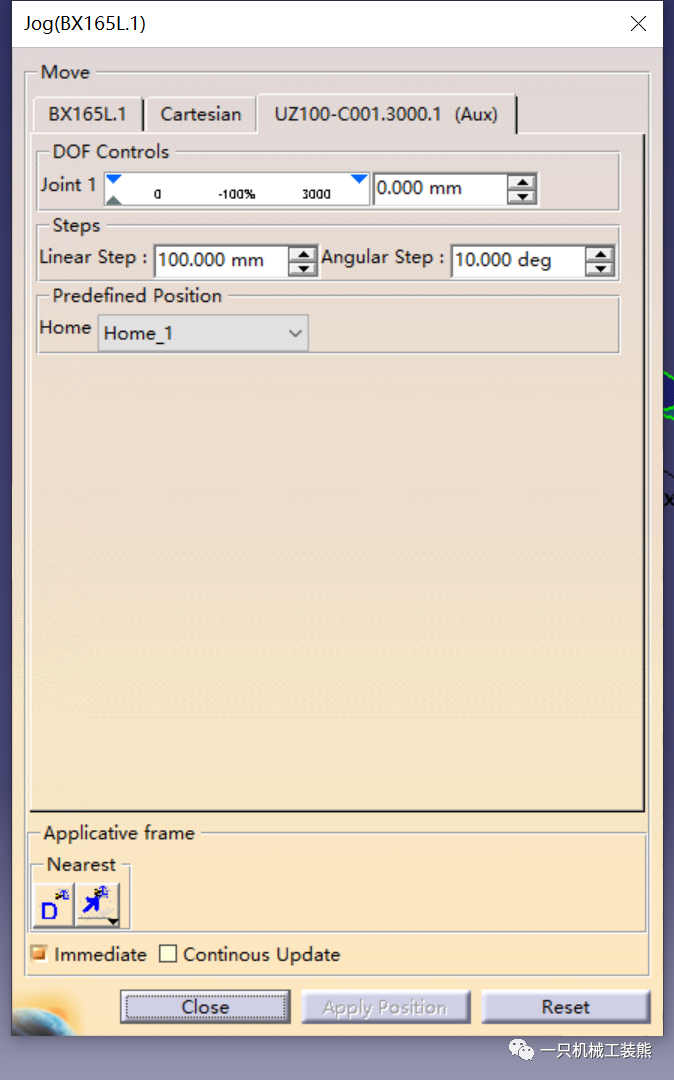
3.此处为机器人与机器人行走轴示教了一些演示用的示教点,运行轨迹与程序如下图。
 “Motion Profile”命令按钮,然后点击左侧图形树中的机器人BX165L,在打开的Motion Profile对话框中可以对机器人运行速度进行创建。
“Motion Profile”命令按钮,然后点击左侧图形树中的机器人BX165L,在打开的Motion Profile对话框中可以对机器人运行速度进行创建。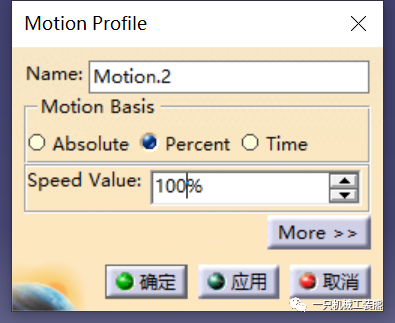
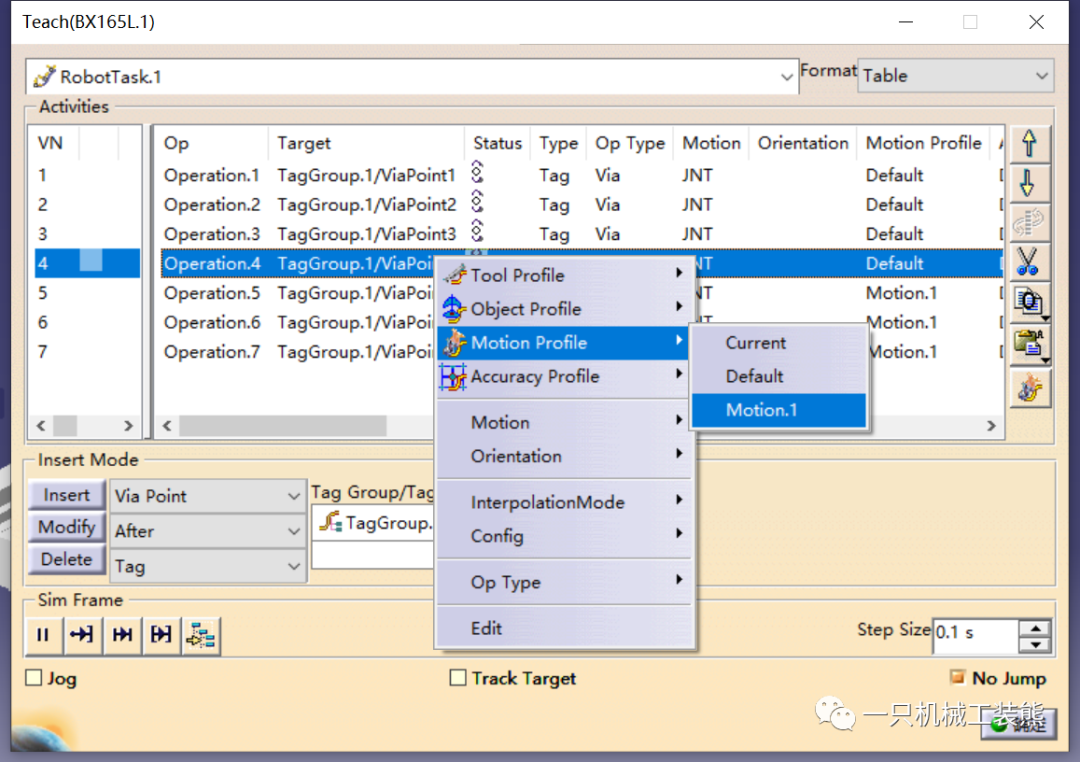
5.新速度创建完成后,在示教Teach对话框中右击需要修改速度的机器人程序,在弹出的快捷菜单中的Motion Profile选项下可以选择新创建的速度选项。
文章来源:一只机械工装熊/公众号
